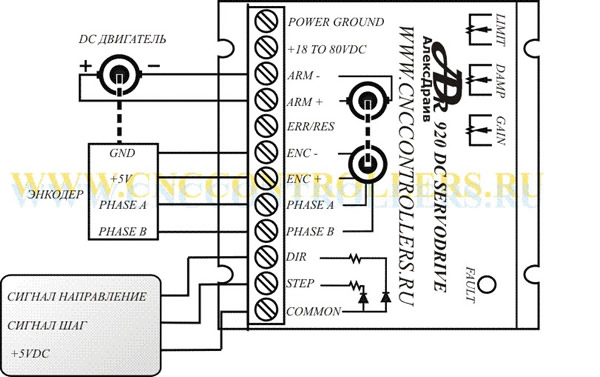
Подключите блок питания к драйверу.
Блок питания должен обеспечивать необходимые напряжения питания двигателя, но не должен превышать 5В от заявленного напряжения питания двигателя производителя. Мощность блока питания должна быть достаточной для обеспечения максимального тока потребляемого двигателем.
ВНИМАНИЕ!
Не рекомендуем применять имульсные блоки питания для питания драйверов, т.к. в большинстве своем они не рассчитаны на работу с индуктивной нагрузкой (электродвигателями) и не обеспечивают стабильное питание.
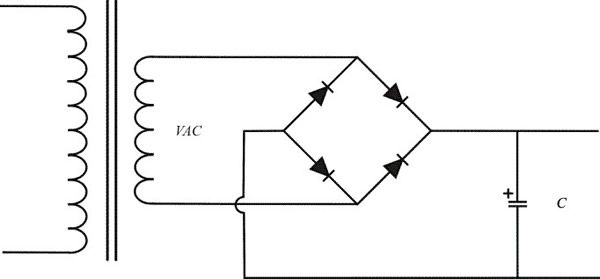
Для питания драйверов рекомендуем использовать ТРАНСФОРМАТОРНЫЙ БЛОК ПИТАНИЯ, фильтр которого рассчитывается по нижеописанной методике, или использовать готовые стабилизаторы с демпфированием обратной ЭДС двигателя ADR552/ADR582.
Емкость конденсатора фильтра блока питания определяется напряжением питания и током потребления двигателя. Для определения емкости конденсатора в мкФ используйте следующую формулу:
(80,000 * I) / V = C
Пример:
Для питания двигателя нам нужно напряжение 65В при токе потребления 5А, подставляем эти значения в формулу и получаем емкость конденсатора фильтра:
(80,000 * 5) / 65 = 6153мкФ
Затем нам необходимо подобрать рабочее напряжение конденсатора, которое минимально должно быть в 1,4 раза больше напряжения питания двигателя.
Примечание: Если частота Вашей питающей сети составляет 50Гц, то в формулу вместо коэффициента 80,000 нужно подставить 100,000.
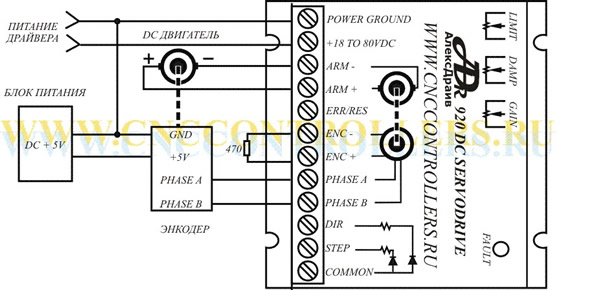
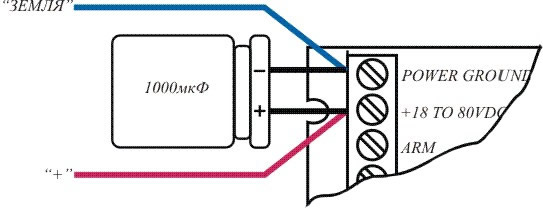
Питающие провода, соединяющие блок питания с драйвером, должны иметь большое сечение. Если длина питающих проводов превышает 45 см, необходимо параллельно клеммам питания драйвера установить электролитический конденсатор емкостью 1000мкФ, как показано на рис. 4:
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте