16.11.2019, 20:28
Автор: Гаврилов Михаил
«ШОРТ-ТРЕК»
Участники
Возрастная группа «Изобретатель». Состав команды до 2-х участников.
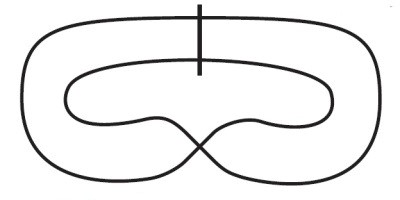
Игровое поле
- Размеры игрового поля 1400*2400 мм.
- Поле представляет собой белое основание с черной линией траектории.
- Линии на поле могут быть прямыми, дугообразными, пересекаться под прямым углом.
- Толщина черной линии 18-25 мм.
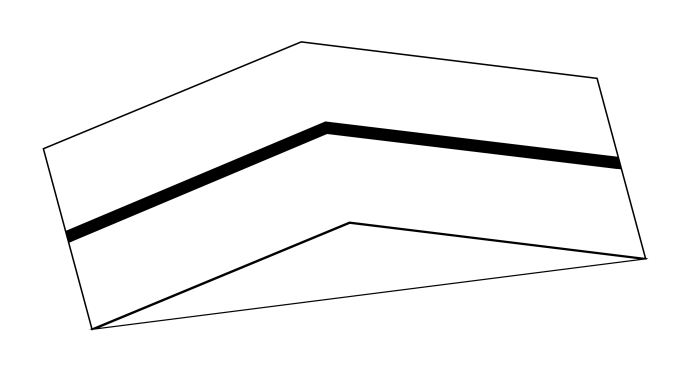
- На линии возможно размещение препятствия (только в одном месте большого и малого круга): горка (размер: 250 мм ширина, 250 + 250 мм длина спуска и подъёма и 30-50 мм высота; основной цвет поверхности белый). Препятствие жестко закреплено на поверхности поля, линия трассы на препятствии не прерывается. Наличие и место расположения препятствия объявляется в день соревнований.
Робот
- Максимальные размеры робота 250*250*250 мм.
- Во время заезда робот не может изменять свои размеры.
- Допускается использование только одного контроллера в конструкции робота.
- Робот может быть собран из любого образовательного конструктора или любых подручных материалов. К соревнованию не допускаются готовые роботы фабричной сборки.
Правила проведения состязаний
Цель робота – за минимальное время проехать по линии полный круг. Движение осуществляется в направлении по часовой стрелке. Круг – полный проезд роботом трассы, с возвращением в место старта, пересекая при этом линию старта-финиша. Организаторы вправе ввести дополнительное задание для участников и дать 1 (один) час на его выполнение. Если, во время заезда, робот не выполняет дополнительное задание, предложенное организаторами, то ему начисляются 15 секунд штрафного времени.
На стартовой позиции робот устанавливается колесами перед линией старта. Движение роботов начинается после команды судьи и нажатия оператором кнопки или с помощью датчика, при этом робот не может приподниматься и остаётся на стартовой позиции.
Соревнования проводятся в два этапа – квалификация и финальные заезды. Между квалификационными заездами будет предоставлено время на дополнительную отладку робота. Между квалификационными и финальными заездами роботы остаются в карантине, время на отладку не предоставляется.
Столкновение роботов:
- В ходе заезда действует правило “перекресток проезжает первый”. Робот, пришедший к перекрестку вторым, обязан пропустить первого, в случае столкновения – дисквалификация участника, совершившего наезд на соперника.
- В случае, когда невозможно определить виновника столкновения, судья обязан назначить переигровку, при этом роботы меняются дорожками.
Квалификационные заезды:
- Количество квалификационных заездов определяет главный судья в день соревнований.
- В квалификационном заезде участвует 1 робот.
- Робот устанавливается перед линией старта.
- Заезд останавливается судьей, если робот не может продолжить движение в течении 30 секунд или время прохождения трассы превышает 120 секунд.
- Заезд на квалификационном этапе состоит из одного полного круга.
- Окончание заезда фиксируется судьей состязания.
- Фиксируется время прохождения трассы.
- Если робот сходит с дистанции (оказывается всеми колесами с одной стороны линии), то он снимается с заезда, при этом результат данного заезда не учитывается, хотя попытка считается использованной.
Финальные заезды:
- В финальных заездах участвуют одновременно два робота (пара) на поле.
- Пары для заездов и дорожка каждого робота определяются с помощью жеребьевки.
- Роботы устанавливаются у линий старта в одинаковом направлении.
- В ситуации, когда робот догоняет соперника, он продолжает движение за соперником до пересечения линии финиша, не допуская столкновения. Если робот, догнавший соперника, провоцирует столкновение, победителем признаётся его соперник.
Определение победителя:
- По результатам квалификации на основании времени заездов составляется рейтинг роботов.
- В финальные заезды проходят роботы, занявшие первые места в квалификации. Количество финалистов определяется главным судьей соревнований в день соревнований в зависимости от количества команд участников.
- Финальные заезды проходят по олимпийской системе (игра на вылет). Судьи соревнований формируют турнирную сетку, в каждом круге из участников составляются пары в соответствии с рейтингом квалификационных заездов и жеребьевки.
- Из каждой пары в следующий круг выходит победитель заезда.
- Перед финальным заездом проводится заезд за третье место.
- Победителем соревнования становится робот, победивший в финальном заезде. Второе место присуждается роботу, проигравшему в финальном заезде.
Скачать архив с документом в формате word doc или docx можно по этой ссылке.
Все положения для проведения соревнований, конкурсов и выставок по робототехнике
Мы собрали большое количество положения для проведения соревнований по робототехнике в школе лицее или техникуме.
Возможно с доработкой применение и в ВУЗах. Ознакомиться с текстом и скачать их в формате doc и docx можно по ссылкам:
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте