Как уже говорилось, сервопривод это точный исполнитель который получая на вход
значение управляющего параметра стремится создать и поддерживать значение на
выходе исполнительного элемента.
В данной статье рассмотрим что же из себя представляют управляющие импульсы, а также то, как
лучше подключать сервоприводы к Arduino.
Правильное подключение сервопривода к плате Arduino
О том как входные импульсы преобразуются в сигналы управления мотором мы рассказали в другой статье.
В данной же статье речь пойдет непосредственно о управляющих импульсах,
будут даны примеры как их сгенерировать на Arduino.
Управляющий сигнал представляет из себя импульсы с нужной нам
шириной, который посылается с определенной частотой.
Для рассматриваемых нами сервоприводов частота посылания импульса почти всегда
будет около 50 Гц (это примерно 1 раз в 20 мс), а ширина импульса будет лежать в
пределе от 544 мкс до 2400 мкс.
Как видно из картинке, импульс шириной в 544 мкс выставит выводной вал в положение 0°,
1520 мск соответствует углу в 90, а 2400 мкс соответствуют 180°.
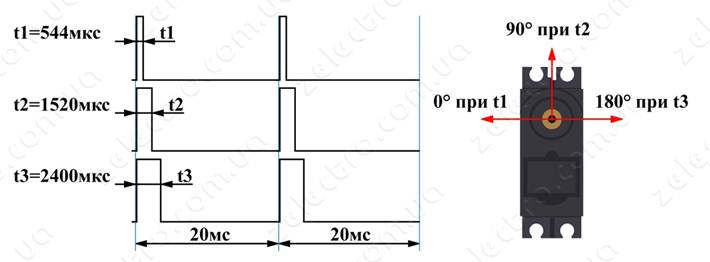
Изменяя ширину импульсов в данных приделах мы сможем точно задавать угол поворота выводного вала, но об этом чуть
позже. На данном этапе статьи хочется рассказать о том как подключить
сервопривод к Arduino.
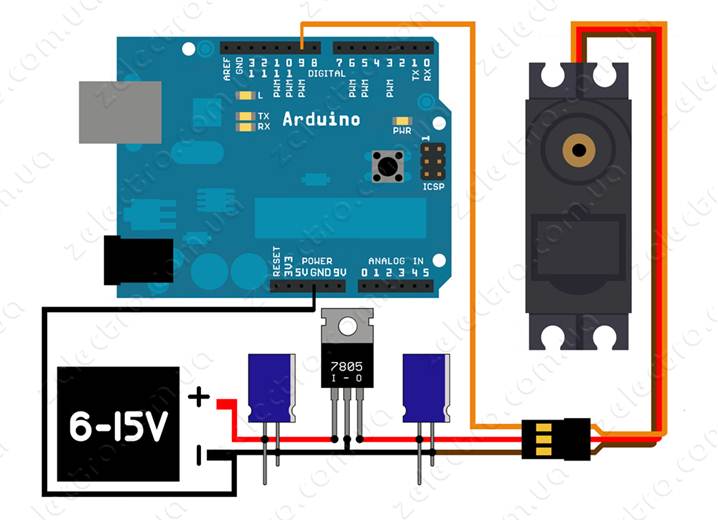
Для подключения к контроллеру от сервопривода тянется 3 провода обжатых стандартным 3 пиновым
разъемом с шагом 2.54мм . Цвета проводов могут варьироваться. Коричневый или
черный - земля (GND), красный - плюс источника питания (VTG), оранжевый
или белый - управляющий сигнал (SIG).
Подключение Серво:
GND на любой из GND пинов ардуино.
VTG на + 5 вольт на ардуино.
SIG на PWM(ШИМ) вывод ардуино.
У старых Ардуин, укомплектованных мегой 8, имеется всего три ШИМ вывода
(digital 9,10,11), у Ардуин укомплектованных мегой 168 или 328 их
6 (digital 3,5,6,9,10,11). Семейство Arduino MEGA имеет на своем борту
целых 14 ШИМ выводов.
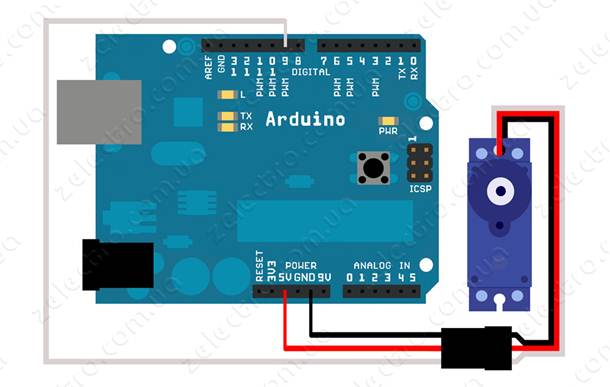
Мини сервы, потребляющие слабый ток, можно подключать напрямую к пинам Arduino.
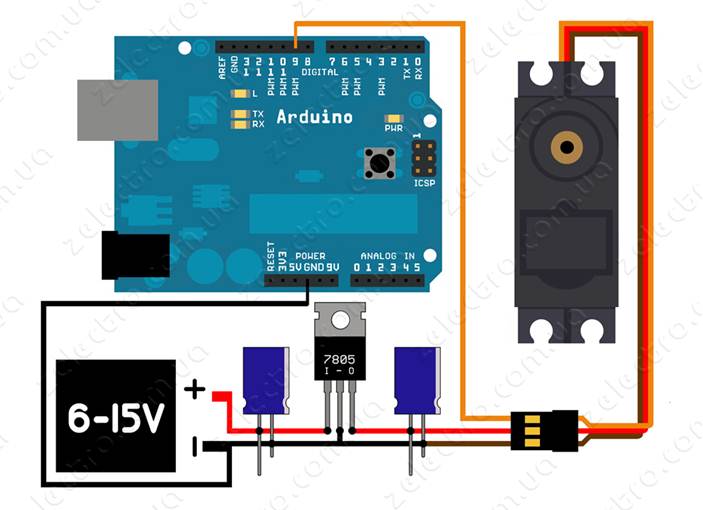
Подключение мощных сервоприводов может вызвать
большую просадку напряжения, контроллеру может не хватить питания, мега8 очень
привередлива и из-за этого контроллер отключится. Так же на плате Arduino
установлен маломощный стабилизатор не рассчитанный на потребление большого тока
и чрезмерное потребление может перегреть его и повредить плату. Во
избежание этого при использовании мощных серв, либо больше одной слабой,
рекомендую подавать питание на сервопривод отдельно. Можно приобрести блок
питания на 5 или 6 вольт, в зависимости от напряжения питания ваше сервы, либо
поставить стабилизатор. В данной статье разберем самый простой на мой взгляд
стабилизатор из серии 7800, требующий минимум деталей внешней обвязки.
Стабилизатор имеет 3 ноги. первая- вход(подаем
напряжение от 6 до 12 вольт) вторая- общий минус. третья выход 5 или 6 вольт в
зависимости от выбранной модели.
7805 отечественный аналог КР142ЕН5А - выходное напряжение 5
вольт.
7806 отечественный аналог КР142ЕН5Б - выходное напряжение 5 вольт.
Как видно из рисунка необходима установка конденсаторов, можно и
без них, но выходное напряжение будет не стабильным. Рекомендуемые номиналы
конденсаторов: на входе 0.33 мкФ, на выходе 0.1 мкФ. Я всегда ставлю два по
100мкФ. Чем больше - тем лучше. И последнее и очень важное о чем стоит
упомянуть так это то, что необходимо соединить земли источников питания.
Основы разобрали, переходим к
примерам скетчей для Arduino.
Вариант 1
В данном скетче зададим 3 угла
поворота выходного вала сервопривода используя управление изменением
непосредственно значения ширины импульса. Данный метод самый точный, однако для
каждого угла ширину импульсов придется подбирать индивидуально.
Пример
программного кода
// добавляем библиотеку для работы с сервоприводами
#include <Servo.h>
// для дальнейшей работы назовем 9 пин как servoPin
#define servoPin 9
// 544 это стандартная длина импульса при котором сервопривод должен принять положение 0°
#define servoMinImp 544
// 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180°
#define servoMaxImp 2400
Servo myServo;
void setup()
{
myServo.attach(servoPin,
servoMinImp, servoMaxImp);
// устанавливаем пин как вывод
управления сервоприводом,
// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.
// импульсы с большей или меньшей длиной восприниматься не будут.
// для сервоприводов даже одной партии значения длин импульсов могут отличаться, может быть даже и 584-2440.
// поэкспериментируйте и найдите идеальные длины импульсов конкретно для вашего сервопривода.
}
void loop()
{
// устанавливаем качалку сервопривода в положение
0°(т.к.импульс равен 544мкс)
myServo.writeMicroseconds(servoMinImp);
delay(2000);
// в данной функции можно задавать длины импульсов
непосредственно числами.
// 90°(т.к.импульс равен 1520мкс)
myServo.writeMicroseconds(1520);
delay(2000);
//
180°(т.к.импульс равен 2400мкс)
myServo.writeMicroseconds(servoMaxImp);
delay(2000);
}
Вариант 2
В данном скетче зададим теже 3 угла
поворота выходного вала сервопривода используя команду myservo.write. В
данной команде мы уже не задаем ширину импульсов, а просто пишем нужный нам
угол. Данный вариант намного удобнее, однако настройка не такая точная как при
первом.
Пример
программного кода
#include <Servo.h>
Servo myservo;
void setup()
{
// устанавливаем пин как вывод управления сервой
myservo.attach(9);
}
void loop()
{
// устанавливаем угол 0°
myservo.write(0);
delay(2000);
// устанавливаем угол 90°
myservo.write(90);
delay(2000);
// устанавливаем угол 180°
myservo.write(180);
delay(2000);
}
Также вам могут понадобиться следующие команды:
myservo.read();
Считывает
текущий угол поворота сервопривода, возвращает значение типа int — угол от 0 до
180 градусов.
myservo.attached();
Проверяем,
привязан ли сервопривод. Возвращает логическое значение bool.
myservo.detach();
Отключает сервопривод от пина.
Давайте рассмотрим ещё один момент про сервоприводы: как сделать реверс сервопривода своими руками.
Реверс сервопривода
Здесь на сайте да и в сети не раз возникал вопрос, как реализовать реверс
сервопривода, без специальных приспособлений или программно в передатчике.
Нам понадобится: отвертка "крест", паяльник.

Аккуратно разбираем сервопривод и меняем местами провода идущие к электродвигателю.
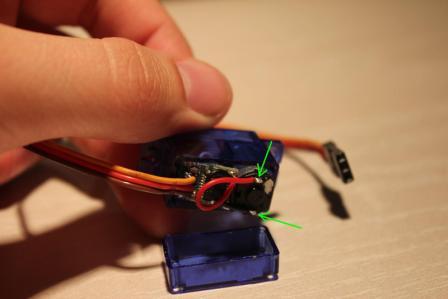
Также меняем местами 2 крайних провода идущие к потенциометру, центральный провод не трогаем.
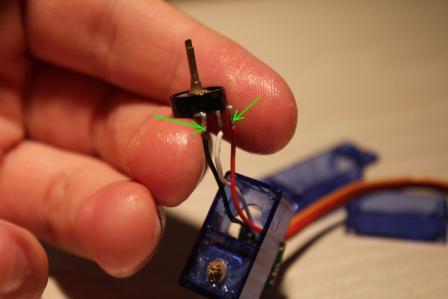
И все, серва работает в обратную сторону))). Не забудьте модернизированный сервопривод пометить маркером или наклейкой чтобы не возникло путаницы в будущем.
Дополнительная информация о сервоприводах
У нас есть книги, заметки и учебные материалы. Скачать можно бесплатно по ссылкам ниже:
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
