Парад уникальных роботов на ICRA 2009 » Обзоры роботов
В японском городе Кобе стартовала международная конференция специалистов в области робототехники и автоматизированных систем IEEE International Conference on Robotics and Automation (ICRA 2009), где будут обсуждаться не только насущные проблемы отрасли, но и демонстрироваться уникальные аппараты. Именно на новых моделях роботов мы и хотели бы заострить свое внимание, тем более, что достойных экземпляров предостаточно.
В японском городе Кобе стартовала международная конференция специалистов в области робототехники и автоматизированных систем IEEE International Conference on Robotics and Automation (ICRA 2009), где будут обсуждаться не только насущные проблемы отрасли, но и демонстрироваться уникальные аппараты. Именно на новых моделях роботов мы и хотели бы заострить свое внимание, тем более, что достойных экземпляров предостаточно.
Исследователи университета Пенсильвании (University of Pennsylvania) планируют провести презентацию аппарата RiSE V3 — четырехногого робота, способного не только передвигаться по горизонтальной поверхности, но и ловко взбираться на столбы и деревья. Уникальные возможности аппарата объясняются наличием игл на конечностях робота, которыми он и цепляется за поверхность. Скорость передвижения в вертикальном направлении составляет 21 сантиметр в секунду. Применения аппарата очевидны — различные спасательные операции, поисковые и разведывательные работы, сервисные работы и пр.
Интереснейшим аппаратом становится миниатюрный робот Adelopod, разработанный инженерами университета Миннесоты. Его отличительной чертой является уникальный способ передвижения — аппарат оснащается двумя «конечностями» длиной около 12 сантиметров, и имеющими две степени свободы. Используя конечности в качестве опоры робот вращается вокруг них, тем самым передвигаясь в нужном направлении. Достоинством такого способа передвижения становится возможность перемещения по практически любой поверхности, будь то асфальт, грунт, песок или даже трава. Благодаря своим размерами и высокой проходимости Adelopod способен исследовать местность, которая для более габаритных роботов просто недоступна.
Немецкие исследователи из Технологического Университета Мюнхена разработали автоматическую систему, способную передвигаться в городских условиях без «подсказок» GPS и/или предустановленных карт местности. Робот способен обращаться за помощью к человеку, спрашивая у него направление движения, и при помощи встроенной системы распознавания речи и жестов фиксируя необходимые команды. Аппарат также способен распознавать и огибать препятствия, встречающиеся на его пути, в автоматическом режиме осуществляется и составление карты местности для последующего применения. Таким образом, робот учится ориентироваться в городе как и многие из нас — двигаясь по уже известному маршруту, либо осуществляя корректировку своих действий при помощи общения с людьми.
Ориентировка на местности, особенно в городских условиях, является важнейшей задачей для робота — становясь полноправным участником уличного, а тем более дорожного движения, он не должен своими действиями мешать человеку, и не подвергать его жизнь опасности. Это касается и будущих роботизированных автомобилей, которым необходимо знать и четко исполнять правила дорожного движения. Для проведения исследований в этой области исследователи Бостонского Университета создали систему Robotic Urban-Like Environment (RULE), имитирующую условия города: разветвленную сеть дорог и наличие других участников дорожного движения. В первую очередь, интерес вызывает комплекс программного обеспечения, посредством которого осуществляется управление движением робота, способного находить маршрут к заданной цели, руководствуясь уже имеющимися знаниями, командами человека, и передвигающегося с соблюдением всех ПДД.
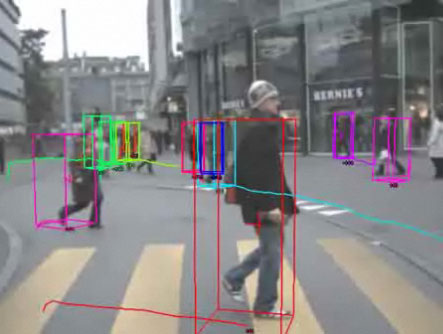
Однако робот должен не только находить правильный маршрут к своей цели, пропускать встречные автомобили. Он должен уметь предотвращать наезд на оказавшегося на дороге пешехода, что, в свою очередь, означает необходимость постоянного слежения за ними. Подобная система распознавания человека и слежения за траекторией его движения разработана сотрудниками исследовательских отделов ETH Zurich и Toyota. Установленная на борту автомобиля система автоматически распознает пешеходов, не только переходящих дорогу, но и двигающихся по тротуару в опасной близости от автомобиля. Пока сам автомобиль не получает команд от нее — управление осуществляет человек, но в будущем такая система, в случае необходимости задействующая тормозную системы машины, сможет предотвращать наезд на пешехода, спасая тем самым здоровье и человеческие жизни.
Ключевые слова:
передвижения
дорожного
аппарата
система
маршрут
передвигаться
предотвращать
человека
помощи
системы
распознавания
Обзоры роботов
робот
Робототехнический сибирский фестиваль «РОБОТЕХ 2011»
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте