10.03.2012, 15:10
Источник: timerobots.ru, roboclub.ru
Первого робота сделать своими руками имея необходимые материалы не так уж и сложно. В данной статье речь пойдет о том, как сделать робота паука из подручных средств. Робот паук не будет иметь моторчиков, он будет статичен и неподвижен. Передвигать его можно только с помощью рук. Но если есть желание, то можно будет самостоятельно поразмыслить над тем, как заставить робота двигаться.
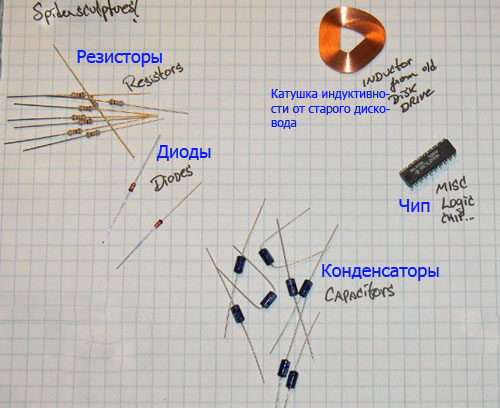
Для создания робота паука из подручных средств понадобятся резисторы и конденсаторы для ног, чип для тела, подходящая деталь для брюшка, можно использовать катушку индуктивности от старого дисковода, диоды для глаз, паяльник.
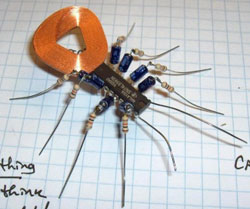
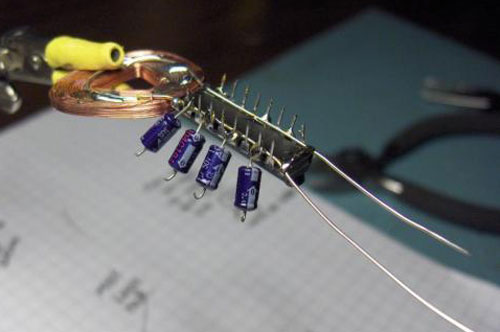
Для начала с помощью куска проволоки нужно соединить чип и деталь предназначенную для брюшка (катушка индуктивности). Проволоку нужно аккуратно припаять к части брюшка и чипу. Пусть проволока будет длинной, так чтобы концы выступали за пределы чипа, что послужит челюстями паука. В конце проволоку можно будет укоротить, чтобы она была похожа на челюсти. Далее нужно сделать лапки робота паука, которыми послужат резисторы. На одном конце резистора делается петелька, лишняя часть обрезается. Из резисторов нужно сделать 8 ног, но можно и больше, по желанию.

Сделанные лапки нанизываем на штыри чипа и припаиваем в нужном положении. Для наглядности смотрите фото.

Затем, нужно обрезать проводки резисторов и сделать крючки так как показано на фото. Это нужно для создания следующих сегментов ног.
Взяв другие резисторы, снова на одном из концов делается петелька и нанизывается на крючок уже припаянных резисторов. Снова припаиваем в нужном положении.
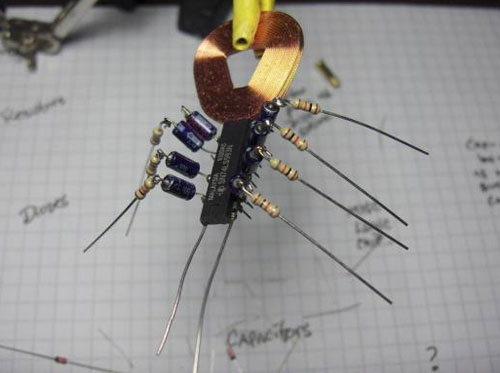
Далее нужно отрегулировать положение ног и паук готов. Роботу своими руками можно сделать глаза. В качестве глаз можно использовать диоды, которые припаиваются спереди робота, в области челюстей.
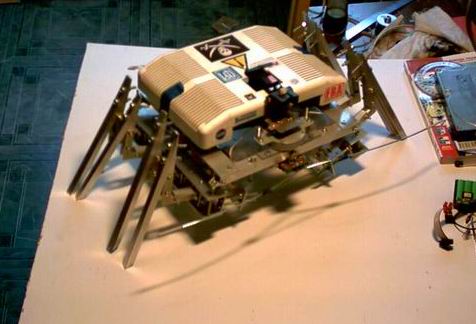
Домашний паук Spike
Представляю вам моего домашнего паучка. Зовут его Спайк. Сделан мной с нуля где-то год назад.
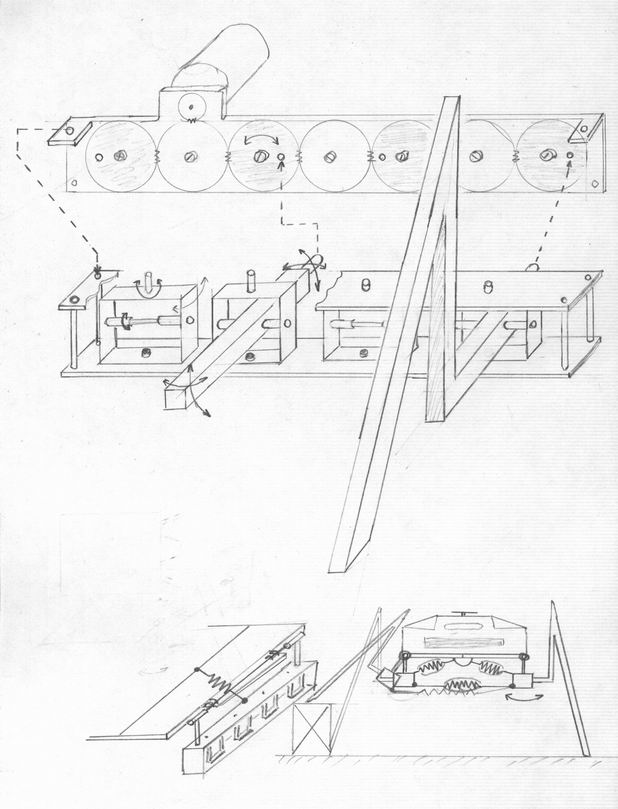
Основа конструкции - алюминиевые профили. Кроме них собственно почти ничего и не используется. Еще из механики присутствуют пара пружин от автомобильных тормозных колодок и 16 одинаковых шестеренок Их пришлось заказывать на www.conrad.de стоило это порядка 300 рублей и в пересчете получилось по 10р за шестеренку. Везли где-то месяц. Механика показана на картинке внизу. Ходовая собрана всего на 2 моторах и управляется аналогично гусеничной. Характеристики получились довольно неплохие: тяга до 4 кг, грузоподъемность до 20 кг. Скорость получилась не самая быстрая: 0.3 м/с. Но это из-за медленных двигателей. Кстати потребление у них вполне скромное: 0.5А при полном ходу с дополнительным весом в 5 кг.
Теперь об электронике: Роботом рулит контроллер ATMEGA8535. Для управления двигателями пока что используются реле. Но их скорости реакции вполне хватает. Из датчиков имеются усы и измеритель расстояния Sharp. Последний закреплен на роторе шагового двигателя и может смотреть по сторонам.
Собственно на этом пока что все и остановилось. Я сейчас работаю над другим роботом, он не такой большой и сложный с механической точки зрения, зато на нем легче испытывать новые алгоритмы. Как только придумаю ему имя - тоже расскажу о нем здесь.
Механика:
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте