Робот построенный из конструктора Lego Technics » Роботы - машины
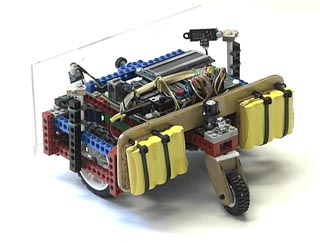
LegoBot построен из деталей конструктора моего сына Lego Technics с использованием нескольких различных микроконтроллеров. Мозгом настоящему образцу служит микроконтроллер Motorola HC11 на плате M.I.T.. 6.270. Это тот же тип контроллеров, который мы использовали в SR04 и Nbot, только без дополнительной платы расширения. Для поклонников Лего заметим, что помимо Лего, в нем присутствуют и другие детали.
Перевод статьи, где описан робот, построенный Дэвидом Андерсоном из конструктора Lego Technics.
LegoBot построен из деталей конструктора моего сына Lego Technics с использованием нескольких различных микроконтроллеров. Мозгом настоящему образцу служит микроконтроллер Motorola HC11 на плате M.I.T.. 6.270. Это тот же тип контроллеров, который мы использовали в SR04 и Nbot, только без дополнительной платы расширения.
Для поклонников Лего заметим, что помимо Лего, в нем присутствуют и другие детали. Так, мы приделали ему спинку из авиационной фанеры, чтобы усилить крепёж элементов питания, и удачно применили пластиковые стяжки в различных местах шасси. Эти структурные компоненты обеспечили прочность платформы, которая оставалась крепкой и функциональной в течение более трех лет разумной и неразумной эксплуатации.
Питание мотора и контроллера обеспечивали десять 1600 мА*ч NiMH аккумуляторов, размещённые в двух наборах по пять штук. Эти пакеты были установлены на фанерную спинку по обе стороны от хвостового колеса. Такая схема расположения нужна была для того, чтобы центр масс робота располагался примерно на расстоянии одного дюйма за ведущими колесами и, таким образом, не позволял бы роботу «клевать носом» во время быстрых маневров, в то же время, обеспечивая достаточную нагрузку на ведущие колеса для хорошего сцепления с поверхностью.
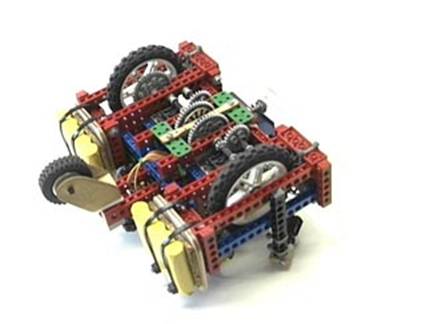
В роботе используется двойной механизм дифференциального привода для движения и рулевого управления. Пара моторов Лего и три набора шестерёнок 40:8 обеспечивают передаточное отношение 125:1. Зубчатые цилиндрические шестерни, которые напрямую подсоединены к двигателям, имеют 32 сегмента с черно-белым рисунком-энкодером, наклеенным на шестерёнки. Они оптически считываются, как и в самодельных датчиках положения вала, чтобы обеспечить обратную связь с двигателем для контроля скорости и вычисления местоположения. Как правило, этот процесс называют "одометрия". Оптические светоотражательные элементы компании Hamamatsu закреплены на фанерной распорке, соединяющей две зеленые детали Лего, которая расположена как раз посередине между двумя выходными валами, как это хорошо видно на приведенном выше изображении.
Ведущие колеса уравновешены с помощью хвостового роликового колеса. Оно сделано из маленького колёсика Лего и двух фанерных дощечек по бокам. Стальной болт и хромированная накидная гайка обеспечивают контакт тефлоновой несущей поверхности в верхней части с хвостовыми кронштейнами. Прямо перед конструкцией хвостового колеса за фанерной спинкой видно кнопку, которая использовалась для ввода параметров программного обеспечения
LegoBot имеет 4 системы датчиков, которые используются для самостоятельной навигации. Описанные выше оптические датчики положения вала поставляют необработанные данные о местоположении (Х, Y) и углах поворота (Theta) в дюймах и градусах соответственно. Используя их, робот может следить за своим положением и двигаться к одной или к нескольким целям. Большая часть демонстрируемых режимов работы (действий, которые робот может совершать) тем или иным образом используют эту его способность к навигации.
с записью простого упражнения по навигации. Цель у робота была одна – точка в 8 футах ( 2,5 м ) прямо перед ним. Достигнув ее, он замедляет движение, останавливается, поворачивается на 180 градусов лицом к старту, затем возвращается на старт и поворачивается, занимая первоначальное положение. Это упражнение также может быть выполнено при помощи более традиционного расчета траектории робота или даже еще более простого способа - расчёта траектории по времени. Однако робот отслеживает свое местоположение 20 раз в секунду и постоянно вычисляет самый короткий путь к цели. Это более очевидно, когда используются другие датчики.
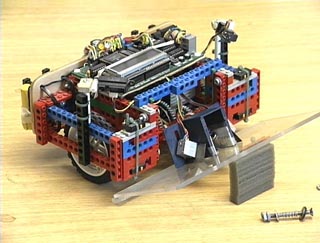
Вторая система датчиков состоит из четырех микровыключателей, вмонтированных в переднюю часть шасси, которые включаются с помощью прозрачного поликарбонатного пластика. Бампер крепится в центре на паре подпружиненных болтов. Таким образом, робот может воспринимать нажатие на бампер слева, справа и по центру. На приведенном выше изображении передний бампер снят с установочных крепежей, чтобы было видно расположение микровыключателей, которые закреплены на своих местах с помощью зеленых проводов.
Реакция робота зависит от того, в какой точке бампера произошло нажатие. Если деформация зафиксирована справа, то робот чуть-чуть откатится назад и повернется влево, если же деформация зафиксирована слева, то робот чуть-чуть откатится назад и повернется вправо. Сжатие в центральной части бампера заставит робота отъехать назад и повернуться на 90 градусов. То, в какую сторону он повернется, влево или вправо, зависит от истории деформаций бампера. Микроконтроллер хранит информацию о времени и местоположении последних 12 деформаций. Робот использует эту информацию, чтобы не запутаться в сложной ситуации, например, среди ножек стула и шнуров питания.
, на котором записано более сложное упражнение по навигации. У робота снова была только одна цель – точка в 8 футах ( 2,5 м ) прямо перед ним. Однако в этот раз на его пути была помеха – вездесущий офисный стул с пятью ножками. Эта задача автономной навигации сочетает в себе задачу одометрии по обнаружению цели и задачу обхождения препятствия с помощью сенсоров бампера. Расчет прямого пути, как и в первом упражнении, прерывается при столкновении с ножками стула и ясно видно, как происходит постоянное вычисление своего местоположения и кратчайшего пути к цели. Путь, пройденный роботом, значительно больше 8 футов , поэтому с этой задачей ни традиционный расчет траектории робота, ни расчёт траектории по времени справиться не могут.
Третья система датчиков состоит из пар источников и детекторов инфракрасного (ИК) излучения встроенных в затемнённую коробку за передним бампером. Они расположены таким образом, чтобы излучение и прием происходили в двух перекрывающихся секторах примерно на расстояниях до 15 дюймов ( 40 см ) перед роботом. На приведенном выше изображении два повернутые друг к другу объекта желтоватого цвета, расположенные в центре затемнённой коробки – это ИК-светодиоды. Две серебристых коробочки, расположенные наклонно по обеим сторонам коробки, – это два ИК детектора. Элементы собраны и экранированы таким образом, чтобы обеспечить два отдельных поля зрения, слегка перекрывающихся в центре, обладающих одинаковой силой детектирования. Индикаторы светодиодов, зеленый для левого и красный для правого, встроены в центральный процессор и загораются, когда сигал поступает из одного или из обоих секторов.
Реакция робота на сигналы ИК-датчиков похожа на реакцию в случае удара по бамперу. Если сигнал поступает справа, робот рулит влево, если сигнал поступает слева, робот двигается вправо. Когда сигнал поступает из центральной области, робот притормаживает (чтобы потом набрать прежнюю скорость требуется некоторое время). В результате робот может тормозить до тех пор, пока не остановится, не имея возможности продвигаться вперед, но имея возможность повернуть влево или вправо. Такое поведение очень эффективно при обхождении препятствий и при маневрировании в узком месте.
, на котором робот продвигается вперед на 8 футов ( 2,5 м ) и возвращается назад, используя ИК-датчики, чтобы объехать картонную коробку. Получив первый сигнал о коробке, чтобы обойти препятствие, робот слишком сильно поворачивает направо, он продолжает поворачивать направо до тех пор, пока не перестают поступать сигналы от ножек стола или от стены. В таком положении он может найти кратчайший путь к цели и пройти к ней между коробкой и ножками стола. Для того, чтобы можно было судить о точности возвращения робота на старт, мы положили на пол белую бумажную салфетку. Похоже, что он промахнулся на один-два дюйма.
Совместно три этих системы датчиков позволяют роботу надёжно работать среди беспорядочно разбросанных вещей (у меня всегда так). Датчики бампера, как последнее средство, срабатывают очень редко, но они необходимы, чтобы защитить робота от повреждений и чтобы он не застрял, в случае если другие датчики не сработали. По длине и ширине они равны самой высокой и самой низкой деталям робота, так что если бампер не заденет препятствие, то и остальные части робота тоже его не заденут.
, в котором робот передвигается по той же комнате, обходя препятствия. В данном случае у него не было конкретного пункта назначения, его целью скорее было полное исследование «неизвестной» обстановки. Заметим, что ИК-датчики хорошо справились с серым офисным стулом с пятью ножками, но с серебристым стулом у них возникли затруднения. И, чтобы обойти «невидимые» ножки стула, по крайней мере, один раз потребовались датчики бампера.
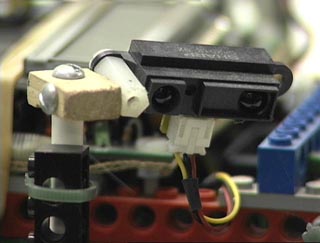
Последняя система датчиков в LegoBot – это пара бесконтактных ИК-датчиков Sharp GP2D12. Они установлены вертикально с помощью трёхосных стержней прямо за передним бампером по обеим сторонам робота. Они направлены вперед, вниз и влево и вправо от центра. Эти датчики возвращают аналоговый сигнал напряжения, величина которого пропорциональна расстоянию до маленького сфокусированного пятнышка ИК света, испускаемого датчиками. Эти данные являются точными на расстояниях от 3 дюймов ( 8 см ) до примерно 30 дюймов ( 80 см ). Эти датчики LegoBot использует, чтобы измерять расстояние до ближайшей стены или до других объектов, чтобы работать в режиме «следования вдоль стены» (обход по периметру).
В этом режиме «следования вдоль стены» путь робота определяется обычными ИК-датчиками и бесконтактными датчиками Sharp. Когда согласно данным бесконтактных датчиков расстояние до стены становится слишком большим, робот поворачивается к стене. Об этом сигнализирует синий индикаторный светодиод (ну должен же я был найти применение для одного из этих крутых СИНИХ светодиодов). Когда робот подходит слишком близко к стене, обычные ИК-датчики для избегания столкновения поворачивают его в сторону. Таким образом, благодаря этим двум системам датчиков робот может следовать параллельно стене или вокруг здания.
, на которой робот движется по длинному коридору в здании Heroy Science Building в SMU (Southern Methodist University - Южный методистский университет). Робот оказывается лицом к стене и поворачивается в соответствии с режимом следования вдоль правой границы. В этом режиме смотрящий налево детектор Sharp не работает. Робот пытается поддерживать постоянное расстояние до стены около 12 дюймов ( 30 см ). Кривизна поворота зависит от расстояния до стены, таким образом, следуя вдоль стены, робот может вносить небольшие поправки в курс, и способен также резко огибать углы, стойки и другие препятствия, встречающиеся на пути.
Система навигации не ограничена способностью передвигаться в коридорах с приятными ровными стенами. Робот также может двигаться по периметру практически любого объекта (например, он может ездить вокруг меня, когда я сижу на полу) или даже беспорядочного набора объектов.
, на которой робот движется по границе беспорядочно расположенных вещей в моем офисе. В этом случае расстояние до стены автоматически увеличилось, учитывая огромное число сигналов от ИК-датчиков, получаемых роботом. Даже при отсутствии гладких стен (которые являются преимуществом для ИК-датчиков) робот может двигаться по периметру комнаты, избегая столкновений с препятствиями. В большинстве соревнований, в которых участвовал LegoBot, использовались очень простые геометрические формы и отражающие поверхности в сравнении с нашими тестами, так что ему обычно аплодировали. Однако, в конце концов, роботу предстоит работать в беспорядочной человеческой обстановке, и это то, к чему стремится LegoBot.
На нашем сайте открыт раздел РОБОТЫ на базе ЛЕГО! Заходите - в этом разделе мы публикуем пошаговые инструкции по сборке роботов LEGO на русском языке! Уже более 100 инструкций!
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте