Трое американских исследователей — Джош Бонгард (Josh Bongard) из университета Вермонта (UVM), а также Виктор Зыков (Victor Zykov) и Ход Липсон (Hod Lipson) из университета Корнелла (Cornell University) — опубликовали в журнале Science
статью, в которой описали четвероногого, похожего на морскую звезду робота, способного без посторонней помощи оправиться от "ранения" посредством моделирования самого себя.
"Мы ещё не дали этому роботу официального названия, но между собой обычно именуем его "Морской звездой" (Starfish), и нас не смущает, что у настоящей морской звезды пять ног, а не четыре, — рассказал Бонгард. — Вообще-то, живая морская звезда намного лучше нашего робота в части восстановления после повреждений, потому что она фактически может заново вырастить ноги".

"Морская звезда" и её создатели. Слева направо: Виктор Зыков, Джош Бонгард и Ход Липсон (фото Cornell University).
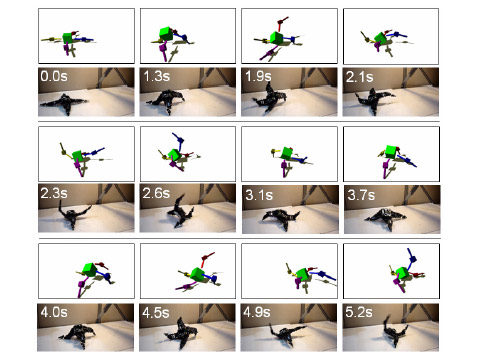
Авторы работы пишут, что их машина "использует взаимосвязь "восприятие — приведение в действие", чтобы изучить своё собственное строение и впоследствии использовать эту "самомодель" для передвижения. А когда часть ноги удалена, робот приспосабливает свою модель для создания альтернативной "походки". Эта концепция может помочь в разработке новых сложных машин и пролить свет на "самомоделирование" у животных".
Другими словами, вместо того, чтобы давать роботу набор жёстких инструкций, исследователи позволяют машине "открыть собственную природу" — решить, как управлять собой: сначала робот учит себя ходить, а в случае повреждения — хромать.
"Большинство роботов имеет фиксированную модель — программу, заложенную инженерами, — объясняет Липсон. — Мы же впервые показали, как модель может появиться внутри самого робота. Это делает машины адаптивными на новом уровне, потому что перед ними можно поставить задачу, не заботясь о создании программы для её выполнения. Мы надеемся, что это — выход роботов на следующую ступеньку познания".
Итак, на первом этапе робот "знает", из каких частей он состоит, однако не "понимает", как они устроены и как их использовать для выполнения главной задачи — движения вперёд.
"Сперва робот вообще не знает, на что он похож. Всё, что ему известно, — он может быть змеёй, деревом или чем-нибудь ещё", — поясняет Липсон.
Разобраться в себе машине помогает научный метод: теория — эксперимент — усовершенствованная теория — другой эксперимент, и так далее.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте