Мобильный робот от INEX - MicroCamp v 2.0: сборка
12.09.2008, 10:43
Автор: Арсеньев А.А.
Собрать мобильного робота из такого
набора - раз плюнуть. НУ максимум два раза.
Всё в комплекте, всё разложено по пакетикам, перечислено в огромной. на
130 страницах, инструкции. Даже винтики разложены по отдельности. в
соответствии с их длиной. Пакетики подписаны...
Даже программатор - в комплекте. Да ещё какой программатор! Коробка небольшая, но красивая. На
ней написано и нарисовано всё, что может в ней лежать. А может лежать
два набора - более простой или полный и более полный. У меня - полный.

На задней стороне коробки - полный перечень всего вложения. Для
покупателя - крайне полезная информация. И абсолютно исчерпывающая. Всё,
что внутри лежит - изображено и подписано снаружи. Абсолютно всё.

Открываем
коробку. Внутри обычная серая картонная коробка, но - с логотипом фирмы
и какими-то надписями. Там куча пакетиков и коробочка. В коробочке -
собственно контроллер, на дне - солидная инструкция.

Растаскиваем пакетики. Да, упаковка крайне качественная. Особо
чувствительные вещи упакованы сначала в двухслойные пузырчатые
пневмо-пакетики, а потом - в обычные.
Всё разложено на столе и изучено по инструкции. Кстати, она на
английском. Учитывая, что фирма INEX - тайваньская, это хорошо. Было бы
куда хуже, окажись инструкция на китайском.
Сюрпризы
Первый сюрприз. Жёлтый кругляш основания шасси гораздо крупнее, чем
казался по картинкам на сайте. Диаметр шасси 150 мм.
Второй сюрприз не такой приятный. Крепёжные отверстия мотор-редукторов
не совпадают с имеющимися на шасси. Моторы, как оказалось, более
крупные, чем те, на которые всё было рассчитано. Пришлось брать
сверлилку в руки и делать два новых отверстия на нужном месте.
Третий сюрприз - люфт в редукторах просто ошеломляюще огромный. Полтора,
если не два миллиметра люфта на окружности колеса - это значит, ни о
какой точности перемещения и позиционировании робота можно даже не
мечтать. Впрочем, это учебный робот...
Четвёртый сюрприз, в общем-то предсказуемый и вытекает из второго.
Корыто для укладки и крепления на шасси платы контроллера не может быть
прикреплено на родных стойках длиной 25 мм. Моторы-то в комплекте и по
высоте больше. Стойки - меньше. Нужно искать новые стойки, на 5..6 мм
длиннее родных. Пока прикрутил чуть-чуть, чтобы прикинуть, как будет
выглядеть.
Солидно выглядеть будет.
Позже выяснилось, что я проглядел на
иллюстрации пометку: поставить 5-мм пластиковую трубку на 25-мм
металлическую трубку. Впрочем, винт всё равно пришлось бы искать более
длинный.
Пятый сюрприз самый приятный. В МК прошита тестовая программа, которая
реагирует на кнопки, очень громко пищит встроенным динамиком и мигает
встроенными светодиодами. И крутит моторами, если верить контрольным
(двухцветным) светодиодам. Пустячок, а приятно.
Шестой сюрприз тоже связан с размерами. Пульт ДУ оказался просто
крошечным. Это плата со впаянными в неё четырьмя кнопками и прочими
детальками, приклеенная двусторонним скотчем к отсеку для двух батареек
типа АА. Сама плата размерами как раз с эту кассету.

Седьмой сюрприз тоже про батарейки. Контроллер имеет размер отсека для
четырёх батарей типа АА и тоже приклеен к нему двусторонним скотчем.
Восьмой сюрприз - дисплей. Он стандартного размера, две строки по 16
символов. Однако заявлено, что он - с последовательным интерфейсом.
Интересно, думаю, какой он марки? А никакой! Дисплей самый обычный...
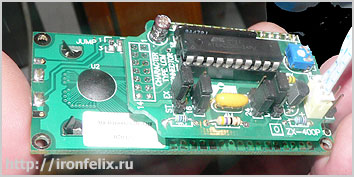
Только к нему снизу припаяна плата контроллера на
Atmel'овском МК, который и делает всю работу по уменьшению числа
проводов... Контроллер этот имеет ряд переключаемых перемычек, то есть
он довольно универсален, может работать с разными МК и разными
дисплеями.
Девятый сюрприз - программатор. Открывая его корпус, думал увидеть там
максимум буфер, собственно, его маркой и интересовался. Однако там ...
правильно... там Atmel'овский МК...

Программатор называется PX-400, он стандартный,
соответствует спецификации для AVR-Prog. Проверка подтвердила:
соответствующий модуль AVR-Studio его сразу увидел и начал работать.
Десятый сюрприз оказался на прилагаемом к конструктору диске. На нём -
исходники примеров, причём для двух сред, как для WinAVR, так и для
AVR-Studio. А так же все необходимые и библиотеки и инструкции ко всему
ПО и к самому конструктору. И собственно ПО присутствует: WinAVR, две
версии AVR-Studio и драйвер для отсутствующего в наборе USB-переходника к
программатору, который имеет интерфейс RS232).
При запуске AVR-Studio на ноутбуке без СОМ-порта программатор PX-400
успешно работал через СОМ-USB-переходник с логотипом "Ровер".
Не хватает в наборе только отвёртки и торцевого шестигранного ключа.
Простенькую крестовую можно было приложить, копейки стоит. Равно как и
торцевой ключ. Больше для сборки не нужно ничего. Провода, крепёж,
детали - всё на месте. Пластиковых деталей даже в избытке.
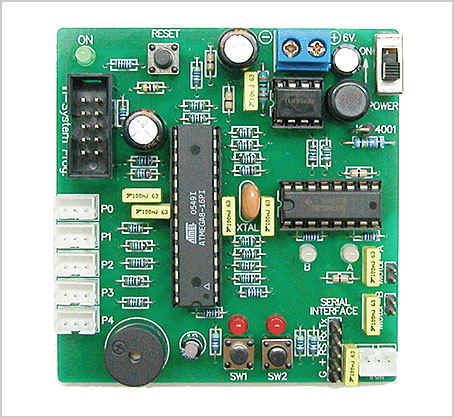
Собственно контроллер Microcamp v1.1 Mega8 описан и показан на картинке в самом низу
этой статьи.
Данный набор смело можно признать стартовым. Всё для успешного старта в
робототехнику присутствует, хотя отвёртку придётся использовать от
стороннего производителя.
Данный набор в части полноты комплектации, функциональности, лёгкости
освоения НЕ имеет конкурентов. Производителям аналогичных наборов есть к
чему стремиться.
Сборка
Процесс не сопровождается никакими неожиданностями, кроме двух описанных
выше сюрпризов, связанных с более крупными мотор-редукторами. Открываем
инструкцию, достаём нужные детальки, соединяем, как на картинке и
перелистываем страницу. Вся сборка занимает несколько часов неспешной
работы, больше всего времени ушло на разметку и сверление двух новых
дырок. Ну, и на поиск в закромах двух дополнительных стоек и двух
длинных винтиков. Эти стойки позволили поднять пластиковое корыто повыше
над мотор-редукторами, и дальше всё снова пошло по плану. Пакетики с
винтиками снабжены наклейками, в каждом пункте инструкции написано,
сколько и каких винтиков надо для крепления того или иного узла.
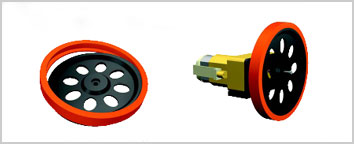
Сначала готовим моторы и
колёса. Внимание! В пакетике с колёсами лежит пара мелких шурупчиков.
Осторожнее, не потеряйте, это крепление колёс к мотор-редукторам.
первым делом надеваем шины на колёса. Затем надеваем колёса на
соответствующие выступы на осях мотор-редукторов и ввинчиваем в оси те
самые маленькие шурупчики.
Устанавливаем мотор-редукторы
на платформу. Если повезёт, отверстия совпадут. Тогда - по картинке. Мне
не повезло. Пришлось делать два отверстия дополнительно.

На пластиковый держатель, в
который вставляется приклеенный к контроллеру отсек батареек, крепятся
две длинные металлические трубки с резьбой. Эти трубки к держателю
крепятся через удлиняющие пластиковые трубки.

Крепим держатель поверх
моторов. Держатель прикручивается двумя винтами. Один винт попадает в
отверстие, но другой - в длинную прорезь, и прикручивать его нужно
аккуратнее.

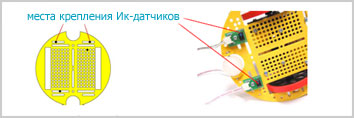
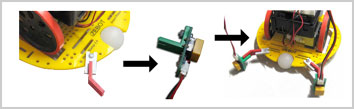
Достаём два ИК-датчика с
проводками. Если разъёмы не вставлены, аккуратно вставляем их в плату
датчиков. Затем вставляем со стороны деталей в отверстие длинный винт М3
15 мм длиной и надеваем на него две пластиковые короткие трубочки.

Затем подготовленные
ИК-датчики вставляем снизу платформы в длинные прорези с того края,
который будет передней частью робота и прикручиваем их гайками..
Расстояние от поверхности, на
которой стоит робот, до нижнего края датчиков должен составлять от 3 до 5
мм. Если этот зазор сильно отличается, придётся подобрать количество
трубочек на винтах, которыми датчики крепятся к платформе.

Пришла пора подключать разъёмы
к контроллеру. Аккуратно разбираем отсек для батарей, сдвигая его
крышку в нужную сторону, ставим четыре АА батарейки и закрываем крышку.
Аккуратно вставляем контроллер отсеком вниз в держатель на верхней части
робота. Теперь вставляем разъёмы в контроллер. Соблюдаем порядок
подключения, указанный на рисунке. Интуитивно понимаем, что справа идут
провода от правого мотора, слева - от левого. В этом случае с
программной точки зрения правый мотор будет называться motor2, а левый
мотор соответственно будет называется motor1. Почему на плате они
подписаны как "Мотор А" и "Мотор В" - непонятно.

Готовим места для крепления
контактных датчиков препятствия. Винтами М3 на 15 мм прикручиваем к
верхней части платформы два пластиковых уголка.

Крепим контактные датчики
препятствия. Они имеют квадратную красную нажимную площадку и перепутать
с другими датчиками трудно. Со стороны деталей вставляем винты М3 на 15
мм и прикручиваем пластиковые уголки, как показано на рисунке.
Промежуточным креплением является полусогнутый уголок, который на трение
вставляется одним вырезом в уголок на платформе, другим - в уголок на
датчике. Позже для снятия этих датчиков не нужна отвёртка.
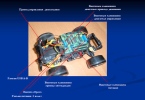
В итоге как раз и получается примерно такой бот, как на сайте обещали.
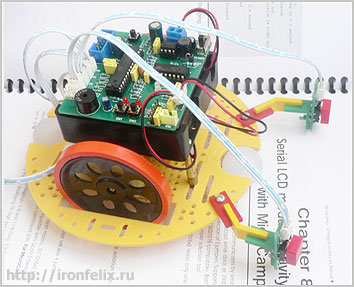
Нет только дисплея - тестовая прошивка его не поддерживает. Впрочем,
тест вообще ничего не поддерживает, кроме светодиодов, динамика,
кнопочек и моторов. Сенсоры, крепление которых описано как обязательное
для первого включения робота, не опрашиваются и не обрабатываются
тестовой прошивкой. Но и за такой тест большое спасибо авторам.
Первые впечатления.
Пищит, мигает, ездит.
Как и обещали - ездит с полметра вперёд и столько же назад без
остановок, пока не поймаешь и не выключишь. Паузы между этими
операциями очень маленькие. Можно оценить правильность фазировки
моторов, поскольку первое движение - вперёд. Если крутится или пятится -
ловить и переворачивать кабели в разъёмах у одного или двух моторов.
Разъём на плате предусмотрительно сделан без ключа, просто два штырька
для каждого мотора. Можно переворачивать кабель как угодно. Вот разъёмы
датчиков имеют мощные ключи и защёлки. Вставить в порт кабель от датчика
нелегко, вытащить ещё труднее. А вытаскивать придётся постоянно. Портов
выведено наружу всего шесть.
При этом один отдельный для приёмника пульта ИК ДУ. В эти разъёмы всю
периферию из комплекта не включить, её больше:
- Два датчика линии
- Два контактных бампера
- Дисплей
- Дальномер Sharp
- Приёмник ИК-ДУ
Как видно, не хватает по крайней мере одного порта. И это только для
прилагающихся датчиков. Дополнительно можно прикупить уйму других или
таких же датчиков. А если понадобится поставить несколько датчиков
линии, чтобы робот мог нормально бегать по линии? Если ещё один
дальномер прикупить и поставить сзади?
Что-то здесь не доработано (с) Чародеи.
Однако, не всё так плохо. Так, один порт можно приспособить от
незадействованного в конструкторе разъёма для RS232. На этот разъём
выведены Rx, Tx, GND, +Vcc и зачем-то ещё и Reset. Это даже не настоящий
разъём, а всего лишь ряд штырьков в одном из углов платы. "Свободным"
является контакт Tx, поскольку Rx параллельно использован в разъёме для
приёмника ИК-ДУ. Ещё три порта замаскировались в 10-контактном разъёме
ISP-программатора. Используемые там выводы МК больше никуда не
задействованы. Изготовив соответствующий переходник. можно подключить
туда хотя бы три дополнительных датчика линии.
Налицо искусственное ограничение функциональности контроллера. Четыре
"незадействованных" порта - это многовато. Для экспериментов он подходит
не так хорошо, как мог бы. Зато для начинающего - очень даже подходит.
Вот только разъёмы снимаются туго... Оторвать их - раз плюнуть.
Работа с этим роботом требует повышенной аккуратности. Кроме того,
работа требует и большого запаса батареек, поскольку в контроллере в
качестве привода моторов стоит L293D. Мой комплект батареек через
полчаса увял и при движении стали жмуриться светодиоды. А это уже
кислородное голодание... Пока установленный на плате контроллера
понижающий / повышающий преобразователь, собранный на TL499A
справляется, но сигнал о смене батареек довольно отчётливый. Внешнего
разъёма для питания нет!
Впрочем, как было написано чуть выше, на плате есть ряд штырьков, на
которые выведено в том числе и питание. Так что подключить внешний
источник не так уж и трудно. Правда, при этом питание пойдёт в обход
преобразователя и это осложняет дело.
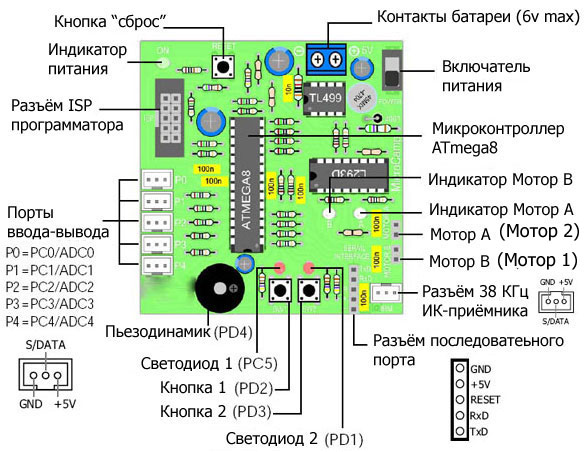
НА
рисунке в документации, где подписаны все элементы контроллера, допущена
ошибка. Кнопки перепутаны. На рисунке, приведённом ниже и кратком
описании контроллера, эта ошибка исправлена.
Контроллеры
Микропроцессорные и микроконтроллерные
модули
Microcamp v2.0
Готовый робоконтроллер
Данный контроллёр реализуется в составе набора-конструктора IE_MICROCAMP
v2.0. Другое название набора: MICROCAMP ATmega8. Кроме контроллера, в
набор входит всё необходимое для сборки учебного робота на двухколёсном
шасси из механики фирмы Tamiya.
Контроллер
собран на базе МК ATmega8. НА плате имеется преобразователь питания для
обеспечения стабильной работы от батарей и драйвер двух двигателей на
микросхеме L293D. Контроллер выполнен на односторонней печатной плате.
Основные элементы контроллера,
размещённые на плате:
- МК ATmega8 в корпусе PDIP-28
- Преобразователь напряжения TL299A
- Драйвер двигателей L293D
- Включатель питания
- Индикатор питания
- Кнопка Сброс
- 2 программируемые кнопки
- 2 программируемых светодиода
- Пьезодинамик
- 6 портов ввода/вывода
- 2 разъёма для моторов
- 2 двухцветных индикатора направления вращения моторов
- Зажимы для проводов отсека батареи (в комплекте)
- Разъём ISP-программатора IDC-10 (стандартный Atmel)
- Разъём последовательного порта RS232 (TTL-уровень!)
Расположение и назначение элементов контроллера Microcamp v2.0,
соответствие портов МК и разъёмов.
Стоимость в России в интернет-магазинах от 4800 до 5500 рублей.
Сайт производителя INEX
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте