14.12.2011, 21:05
 | Состязание роботов Кегельринг часто используется интересно тем, что в нем могут принимать участие как новички, только начинающие знакомится с миром робототехники, так и уже опытные создатели роботов. |
Если в кратце сформулировать условие состязаний, то можно сказать, что основной целью робота является освобождение ринга от кеглей. Тот робот, что справляется с этой задачей за наименьшее время объявляется победителем.
Этот вид соревнований - интереснен и познавателен для робототехника любого уровня, поскольку позволяет в ходе подготовки задуматься над конструкторскими особенностями механизма и над алгоритмом поведения робота.
В данном цикле заметок, предлагается поразмышлять, над каждым аспектом по отдельности.
Итак, что же может из себя представлять конструкция робота?
Колесная база – это расположение колес и количество и способ подведения к ним энергии от двигателей. Традиционно рассматривают две основные схемы, остальные же являются модификациями этих двух.
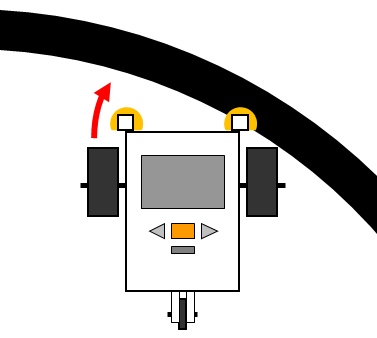
Первая схема с рулевыми колесами.
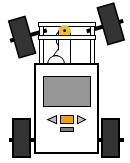
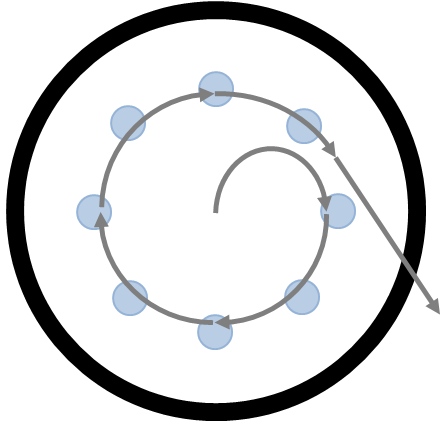
В этой схеме направление движения задается положением управляющих колес относительно корпуса механизма. Преимущество такой схемы: возможность установки нескольких двигателей на ведущие колеса, что позволит увеличить общую мощность механизма. Недостаток схемы – это сложность выполнения поворотов: данное устройство не сможет выполнять поворот вокруг своей оси, т.е. разворот будет требовать значительных временных затрат, а также наличия достаточного места для выполнения разворота. Тем не менее можно попробовать рассмотреть программирование робота для движения по таким траекториям, которые позволяют обойти/собрать/сбить все кегли избегая ненужных разворотов.
Колесная база, основывающаяся на «танковой» схеме, значительно выигрывает у предыдущей в скорости выполнения разворотов. Такой тележке ничего не стоит сделать разворот вокруг своей оси на нужное количество градусов, чтобы направится прямиком к очередной кегле.
Что при схеме с управляющими колесами, что при тележке, собранной по танковой схеме, у робота могут быть такие колеса, задача которых поддерживать механизм над поверхностью ринга и не давать другим частям механизма замедлять движение. Их можно назвать – опорные колеса.
Особенности использования того или иного способа конструирования опорных колес подробно описывались вот здесь.
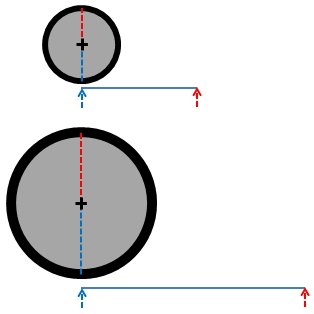
Другой аспект, который нужно учитывать при конструировании робота для состязаний Кегельринг – скорость движения. Это важно, поскольку нужно выполнить задание быстрее всех. Использовать свежие батарейки и запускать моторы на полную мощность – это очевидное решение, его будут использовать большинство ваших соперников. Менее очевидное решение – это добиться такого эффекта, чтобы один поворот двигателя перемещал робота на наибольшее расстояние. Например, если поставить на робота колеса большего диаметра, - это будет приводить к желаемому результату.
Как показано на рисунке ниже, маленькое колесо за поворот двигателя на 180 градусов, проедет гораздо меньшее расстояние, чем проедет большое колесо при повороте двигателя на эти же 180 градусов.
Другой способ достичь похожего результата – установить на мотор и колеса шестерни. На мотор – большую, на колеса – маленькую. Что получится – смотрите на картинке ниже:
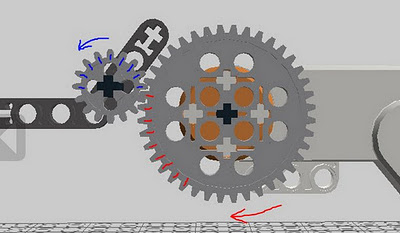
Мотор сделает чуть меньше, чем четверть поворота (9 зубцов, отмеченных красным), а маленькая шестерня при этом обернется на 180 градусов (9 зубцов, отмеченных синим). Т.е. за полный оборот двигателя, колесо сделает 4-5 оборотов вокруг своей оси, тем самым проехав в 4-5 большее расстояние, нежели в случае, когда оно присоединено непосредственно к двигателю.
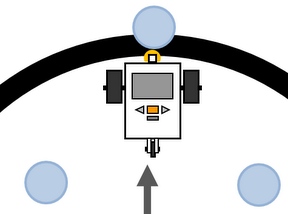
Ну и конечно, еще одним важным вопросом при конструировании будет вопрос о том, какие и сколько датчиков ставить на робота. В общем случае, роботу понадобится датчик для определения местанахождения кеглей, а также датчик для контроля, выехал ли робот за пределы ринга. С решения первой задачи традиционно используют один или несколько датчиков расстояния. А для определения границ ринга подойдут световой или цветовой датчики.
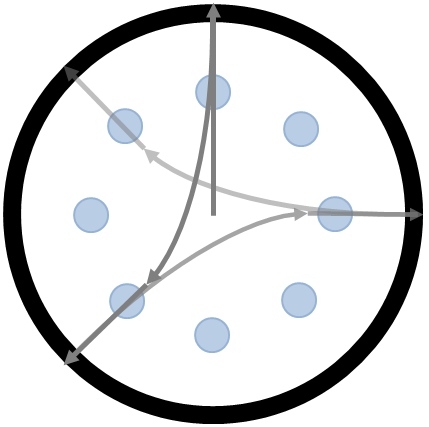
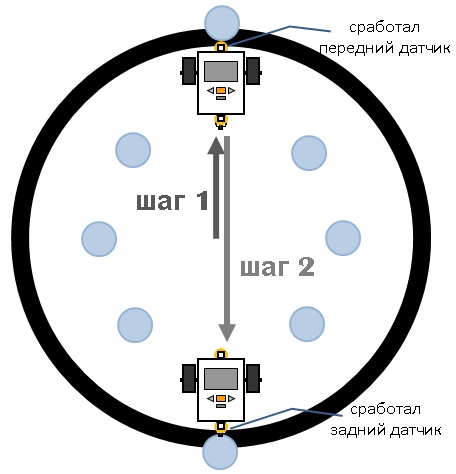
Имеет смысл рассматривать установку нескольких датчиков освещенности (или цветовых) для лучшего определения роботом своего положения на ринге.
Например, в данном случае программа может распознать, что робот двигается под углом относительно ограничительной линии, поэтому ему нужно продолжить движение только левым мотором, чтобы выравнять свое положение и стать направленным к центру ринга.
Источник: https://nnxt.blogspot.com/
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте