 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
Спиральный робот плавает как бактерия
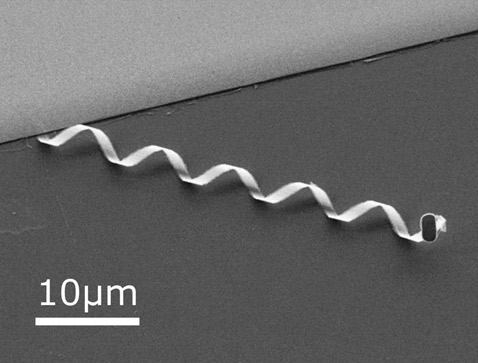
Недавно Брэдли и его коллеги первыми сумели построить "Искусственный бактериальный жгутик" (Artificial Bacterial Flagella — ABF) — образование микрометровых размеров. Да ещё прикрепили его к "голове" — аналогу бактерии. Создав несколько таких изделий, названных "Спиральными плавающими микророботами" (Helical Swimming Microrobot), экспериментаторы пустили их в жидкость, воспроизводя ситуацию, когда подобным устройствам потребуется перемещаться не хаотично, но в определённом направлении, задаваемом человеком. ABF насчитывают в длину от 25 до 75 микрометров, что лишь немногим больше, чем длина настоящих жгутиков у бактерий (5-25 мкм). Представляют собой эти искусственные "хвостики" свитые в спирали плоские ленточки. Толщина лент равна 27-42 нанометрам, ширина — менее 2 микрометров, а диаметр спирали — около 3 мкм. Голова робота состоит из трёх тонких слоёв: хром, никель и золото. Именно никель, как магнитный материал, отвечает за вращение всего "конструктора". Учёные прикладывают к микроботам магнитные поля, а они заставляют вращаться и поворачиваться головки роботов — вот те и плывут.
| ||||||
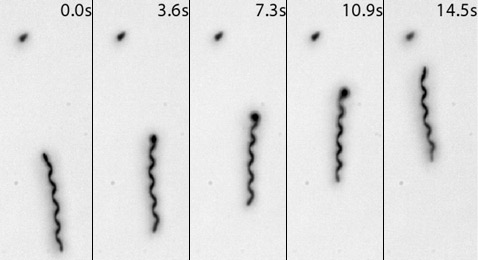
Один из первых образцов микроробота с ABF, показанный на этих снимках, при собственной длине 74 микрометра достигал средней скорости движения 5 микрометров в секунду при частоте вращения 470 оборотов в минуту. Тёмная точка вверху – цель, к которой учёные старались направить свою "хвостатую бактерию" (фото Institute of Robotics and Intelligent Systems/ETH Zürich). |

Кстати, Нельсон известен нам по созданию хирургического микробота — устройства, похожего на миниатюрную стрелку компаса, управляемую внешним магнитным полем.
Но в новом проекте есть существенные отличия. В первом случае (как и в целом ряде сходных экспериментов, проводимых в других университетах и институтах) крошечные "зонды" напрямую подталкиваются в нужную сторону внешним полем. Исследователи полагают, что такие "микромагниты" можно при помощи электромагнитов внешних довести до нужной точки в теле, чтобы там они могли выполнить свою задачу. К примеру, воздействовать на опухоль или атеросклеротические наросты в сосуде.
А вот ABF, полагают швейцарцы, позволяет управлять движением робота-бактерии куда более точно. Ведь тут внешнее поле лишь приводит в движение "хвост", а он уже толкает всего робота.
Команда Брэдли разработала специальное программное обеспечение, позволяющее создавать при помощи нескольких катушек вращающиеся поля сложной конфигурации. Так, по командам человека ABF может двигаться вперёд и назад, вверх и вниз, а также вращаться во всех направлениях.
Максимальная скорость движения ABF составила 20 микрометров в секунду, но авторы работы уверены, что вскоре её можно будет увеличить до 100. Для сравнения — E. coli разгоняется до 30 мкм/с.
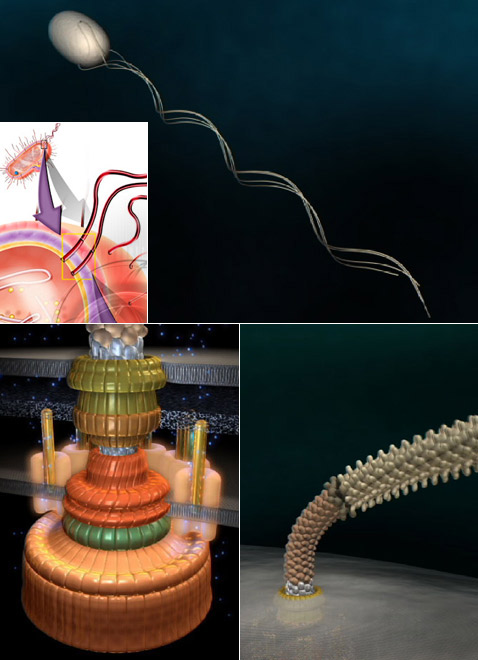
Жгутики вращаются относительно самой бактерии за счёт молекулярных моторов, встроенных в мембрану клетки. Эти удивительные образования нанометровых размеров работают за счёт передвижения протонов или ионов и располагают природными аналогами подшипников, роторов и статоров. И в этом их отличие от ABF – там нет подвижных друг относительно друга деталей, весь микроробот крутится как единое целое (иллюстрации с сайтов nanonet.go.jp и evolutionoriented.wordpress.com).
Но как удалось создать такие тонкие спирали?
Для этого экспериментаторы методом осаждения пара последовательно наносят на подложку два или три ультратонких слоя из смеси индия, галлия, мышьяка и хрома в той или иной пропорции и последовательности (тут есть варианты).
|
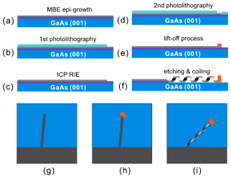
При помощи нескольких чередующихся фаз фотолитографии и травления создаётся заготовка узкой ленты, которая сама завивается в спираль, как только её отделяют от подложки. За свёртывание отвечают межатомные связи: в разных слоях образуются неодинаковые молекулярные решётки, объясняют учёные.
В зависимости от толщины слоёв и их состава меняются параметры ABF. Нельсон поясняет: "Мы можем определить не только размер спирали, но даже направление скручивания ленты, которая её образует".
Создатели плавающих микророботов полагают, что в будущем такие устройства смогут точечно поставлять лекарства к очагам поражения внутри человека. При этом такой способ выгодно отличается от прямого перетягивания каких-либо капсул магнитом. Ведь для движения ABF необходимо приложить очень слабое, совершенно безопасное поле (1-2 миллитесла).
Можно, конечно, заставить перевозить полезный груз и живые клетки, но тут придётся полагаться на их собственные "соображения", куда нужно двигаться.
Другие высокотехнологичные варианты вроде нанокапсул и нанобиозондов отличаются тем, что за доставку к цели там отвечают специфические наночастицы или молекулярные комплексы, своего рода "ключи", узнающие "замки" на поверхности целевых клеток. Helical Swimming Microrobot не требуется такой "интеллект", а гарантией попадания в яблочко будет умение управляющей магнитами программы.
Правда, Нельсон говорит: "Для применения новинки в организме человека в первую очередь нужно научиться направлять ABF очень точно, отслеживая их маршрут без оптического мониторинга, а также необходимо гарантировать их локализацию на всё время".
Для реализации такой цели авторы проекта намерены ещё уменьшить размер своих роботов и повысить их скорость движения, равно как поработать над управляющей системой. Нельсон уверен – спирали ABF найдут применение и в медицине, и в фундаментальных исследованиях.
Создатели Helical Swimming Microrobot радуются, что их боты так похожи на бактерии. Учёным не потребовались миллиарды лет, чтобы придумать прекрасный способ перемещения микрометровых объектов в жидкой среде — за исследователей это сделала Природа.
