Что такое робот?
Статья из серии: "История роботехники".
07.05.2006, 15:27
 Робот – это универсальный автомат, позволяющий выполнять механические действия.
Его принципиальной особенностью является быстрая оперативная перестройка с одной
выполняемой операции на другую. Сущуствует несколько разновидностей роботов и
для каждого из них имеется своё определение. Чаще всего говорят о трёх
поколениях роботов: промышленных роботах, адаптивных роботах и роботах с
искусственным интелектом или как говорили раньше – интегральных роботах.
Первые шаги робототехники. Кибернетические игрушки.
Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в области
науки и техники. Появились и начали широко применяться различные электрические
устройства, генераторы тока, электрические двигатели, аккумуляторы, были
изобретены телеграф и телефон. Электрическая энергия начала использоваться всё
шире и шире. В начале 20 столетия начали интенсивно развиваться новые науки –
радиотехника, электроника. Новые научные открытия и изобретения позволили
проблему создания роботов перевести на новый, более совершенный фундамент.
Появились реальные возможности оснастить робот зрением – фотоэлементами, слухом
– микрофонами, речью – громкоговорителями.
В то же время начали появляться первые плоды науки, которая позже стала
называться кибернетикой. Учёные и инженеры начали разрабатывать устройства,
которых, хоть и скромно называли кибернетическими игрушками, создавали отнюдь не
для развлечения. Они служили примером практического воплощения идей
автоматического управления, моделировали поведение живых организмов в простейших
ситуациях. Большую известность среди этих кибернетических игрушек приобрели
устройства, напоминающие черепах, жуков, белок, собак и др. Первые простейшие
схемы таких устройств, способных двигаться в направлении света, разработал
основатель кибернетики Н. Винер.
Робот – это универсальный автомат, позволяющий выполнять механические действия.
Его принципиальной особенностью является быстрая оперативная перестройка с одной
выполняемой операции на другую. Сущуствует несколько разновидностей роботов и
для каждого из них имеется своё определение. Чаще всего говорят о трёх
поколениях роботов: промышленных роботах, адаптивных роботах и роботах с
искусственным интелектом или как говорили раньше – интегральных роботах.
Первые шаги робототехники. Кибернетические игрушки.
Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в области
науки и техники. Появились и начали широко применяться различные электрические
устройства, генераторы тока, электрические двигатели, аккумуляторы, были
изобретены телеграф и телефон. Электрическая энергия начала использоваться всё
шире и шире. В начале 20 столетия начали интенсивно развиваться новые науки –
радиотехника, электроника. Новые научные открытия и изобретения позволили
проблему создания роботов перевести на новый, более совершенный фундамент.
Появились реальные возможности оснастить робот зрением – фотоэлементами, слухом
– микрофонами, речью – громкоговорителями.
В то же время начали появляться первые плоды науки, которая позже стала
называться кибернетикой. Учёные и инженеры начали разрабатывать устройства,
которых, хоть и скромно называли кибернетическими игрушками, создавали отнюдь не
для развлечения. Они служили примером практического воплощения идей
автоматического управления, моделировали поведение живых организмов в простейших
ситуациях. Большую известность среди этих кибернетических игрушек приобрели
устройства, напоминающие черепах, жуков, белок, собак и др. Первые простейшие
схемы таких устройств, способных двигаться в направлении света, разработал
основатель кибернетики Н. Винер.
 Наибольшую известность приобрели три “черепашки”, созданные английским
биофизиком и нейрофизиологом Г. Уолтером в 1950 – 1951 гг. Эти устройства
представляют собой самодвижущиеся электромеханические игрушки, способные ползти
на свет или от него, обходить препятствия, заходить в “кормушку” для подзарядки
разрядившихся аккумуляторов и тому подобное. “Черепашки” приводятся в движение с
помощью двух электродвигателей, питаемых от аккумуляторов. Первый двигатель
обеспечивает поступательное движение устройства, второй, расположенный на
рулевой колонке, изменяет направление движения. Чувствительными элементами
первых двух “черепашек” Г. Уолтера являются фотоэлемент, расположенный на
рулевой колонке, и механический контакт, замыкаемый при наезде на препятствие.
Управление поведением осуществляется с помощью несложной электронной схемы с
обратной связью. Несмотря на очень простое устройство, “черепашки” демонстрируют
забавные свойства. В темноте или при слабом свете они беспорядочно ползают, как
будто что-то ищут. Натыкаясь на препятствие, они сворачивают и пытаются их
обойти. Если имеется достаточно сильный источник света, они его скоро “замечают”
и решительно направляются в его сторону (положительный тропизм). Однако подойдя
к свету слишком близко, они от него отворачиваются (отрицательный тропизм).
Теперь они двигаются вокруг источника света, находя для себя оптимальные условия
и непрерывно поддерживая их (гомеостазис). Между двумя источниками света
“черепашки” совершают путешествия от одного к другому наподобие бурдианова осла,
который, как известно, умер от голода, находясь между двумя одинаковыми копнами
сена, не будучи в состоянии выбрать, какой из них вкуснее. Две черепашки “видят”
и “узнают” друг друга по зажжёной лампочке и ползут друг другу навстречу.
Стенфордский интеллектуальный робот
Робот “Шейки” был создан в 1969 году в Стенфордском исследовательском институте
(США) и назывался тогда интегральным роботом или мобильным автоматом с
использованием принципов искусственного интеллекта. Этот робот состоит из
подвижной части, ЭВМ SDS-940 и соответствующего програмного обеспечения.
Подвижная часть робота приводится в движение с помощью двух шаговых двигателей,
имеющих независимые приводы к колёсам на каждой стороне тележки. В верхней части
роьота, которая может поворачиваться вокруг вертикальной оси, установлены
телевизионная камера и оптический дальномер. В центре расположен блок
управления, который распределяет команды, поступающие от ЭВМ к механизмам и
устройствам, реализующим соответствующее действие. Имеются специальные приводы,
которые управляют фокусным расстоянием телевизионной камеры, её диафрагмой и
углом поворота верхней части робота. Помимо телевизионной камеры и дальномера по
периметру робота установлены специальные тактильные датчики – сенсоры в виде
“усов” для получения информации о столкновении с препятствием. Команды от
вычислительной машины к роботу и информация от робота к ЭВМ подаются по двум
специальным радиоканалам.
Робот создан для изучения процессов управления в сложной окружающей среде в
реальном масштабе времени. Все функции, которые должен выполнять робот, можно
разделить на три класса: решение задачи, восприятие, моделирование. Под решением
задачи понимается выполнение определённой последовательности элементарных
действий, например, вращение колёс или поворот верхней части и осмотр
пространства перед ним. Перед началом определённых действий обычно
осуществляется процесс планирования их. Чтобы правильно спланировать
элементарные действия, робот с искусственным интеллектом должен “знать” конечную
цель этих действий. Восприятие робота осуществляется с помощью сенсорных
систем-датчиков внешней информации об окружающей среде. Наибольшее количество
информации робот получает по зрительному каналу. Моделирование предусматривает
создание модели внешней среды робота. Система управления робота, осуществляющая
решение задач, использует записанную в модели информацию для планирования
ирасчёта последовательности действий. По мере изменения внешней среды активными
действиями самого робота или по другим причинам модель должна преобразоваться с
целью запоминания этих изменений. Кроме того, в модель должна добавляться новая,
текущая информация о внешней среде, которую робот приобретает в процессе её
познания.
Робот может выполнять различные операции, степень сложности которых меняется от
простого изменения направления движения до сборки нескольких предметов в
определённое место комнаты. Робот не имеет манипулятора – руки, и поэтому
перемещение предметов осуществляется простым их толканием по полу. Робот может
перемещаться по кратчайшему пути в заданное место помещения, вычисленному таким
образом, чтобы избежать столкновения с окружающими предметами. Робот “живёт” в
реальной среде простых объектов: коробок различной формы, дверных проёмов, стен
и т. д. Его зрительная система выделяет информацию о такой среде из стандартного
телевизионного изображения. Искусственный интеллект робота находится отдельно от
подвижной части. Это объясняется большими размерами ЭВМ того поколения. В
настоящее время установка бортовой ЭВМ (не контроллера) не является проблемой.
Космические роботы. Планетоходы.
В период до 1989 года человечеству было известно три модели планетоходов. Это
советские самоходные исследовательские аппараты “Луноход-1”, “Луноход-2” и американские типа
LRV. Они являются выдающимися образцами инженерного творчества. Опыт их создания
и эксплуатации на Луне дал богатый материал по принципам проектирования,
изготовления многих элементов
Наибольшую известность приобрели три “черепашки”, созданные английским
биофизиком и нейрофизиологом Г. Уолтером в 1950 – 1951 гг. Эти устройства
представляют собой самодвижущиеся электромеханические игрушки, способные ползти
на свет или от него, обходить препятствия, заходить в “кормушку” для подзарядки
разрядившихся аккумуляторов и тому подобное. “Черепашки” приводятся в движение с
помощью двух электродвигателей, питаемых от аккумуляторов. Первый двигатель
обеспечивает поступательное движение устройства, второй, расположенный на
рулевой колонке, изменяет направление движения. Чувствительными элементами
первых двух “черепашек” Г. Уолтера являются фотоэлемент, расположенный на
рулевой колонке, и механический контакт, замыкаемый при наезде на препятствие.
Управление поведением осуществляется с помощью несложной электронной схемы с
обратной связью. Несмотря на очень простое устройство, “черепашки” демонстрируют
забавные свойства. В темноте или при слабом свете они беспорядочно ползают, как
будто что-то ищут. Натыкаясь на препятствие, они сворачивают и пытаются их
обойти. Если имеется достаточно сильный источник света, они его скоро “замечают”
и решительно направляются в его сторону (положительный тропизм). Однако подойдя
к свету слишком близко, они от него отворачиваются (отрицательный тропизм).
Теперь они двигаются вокруг источника света, находя для себя оптимальные условия
и непрерывно поддерживая их (гомеостазис). Между двумя источниками света
“черепашки” совершают путешествия от одного к другому наподобие бурдианова осла,
который, как известно, умер от голода, находясь между двумя одинаковыми копнами
сена, не будучи в состоянии выбрать, какой из них вкуснее. Две черепашки “видят”
и “узнают” друг друга по зажжёной лампочке и ползут друг другу навстречу.
Стенфордский интеллектуальный робот
Робот “Шейки” был создан в 1969 году в Стенфордском исследовательском институте
(США) и назывался тогда интегральным роботом или мобильным автоматом с
использованием принципов искусственного интеллекта. Этот робот состоит из
подвижной части, ЭВМ SDS-940 и соответствующего програмного обеспечения.
Подвижная часть робота приводится в движение с помощью двух шаговых двигателей,
имеющих независимые приводы к колёсам на каждой стороне тележки. В верхней части
роьота, которая может поворачиваться вокруг вертикальной оси, установлены
телевизионная камера и оптический дальномер. В центре расположен блок
управления, который распределяет команды, поступающие от ЭВМ к механизмам и
устройствам, реализующим соответствующее действие. Имеются специальные приводы,
которые управляют фокусным расстоянием телевизионной камеры, её диафрагмой и
углом поворота верхней части робота. Помимо телевизионной камеры и дальномера по
периметру робота установлены специальные тактильные датчики – сенсоры в виде
“усов” для получения информации о столкновении с препятствием. Команды от
вычислительной машины к роботу и информация от робота к ЭВМ подаются по двум
специальным радиоканалам.
Робот создан для изучения процессов управления в сложной окружающей среде в
реальном масштабе времени. Все функции, которые должен выполнять робот, можно
разделить на три класса: решение задачи, восприятие, моделирование. Под решением
задачи понимается выполнение определённой последовательности элементарных
действий, например, вращение колёс или поворот верхней части и осмотр
пространства перед ним. Перед началом определённых действий обычно
осуществляется процесс планирования их. Чтобы правильно спланировать
элементарные действия, робот с искусственным интеллектом должен “знать” конечную
цель этих действий. Восприятие робота осуществляется с помощью сенсорных
систем-датчиков внешней информации об окружающей среде. Наибольшее количество
информации робот получает по зрительному каналу. Моделирование предусматривает
создание модели внешней среды робота. Система управления робота, осуществляющая
решение задач, использует записанную в модели информацию для планирования
ирасчёта последовательности действий. По мере изменения внешней среды активными
действиями самого робота или по другим причинам модель должна преобразоваться с
целью запоминания этих изменений. Кроме того, в модель должна добавляться новая,
текущая информация о внешней среде, которую робот приобретает в процессе её
познания.
Робот может выполнять различные операции, степень сложности которых меняется от
простого изменения направления движения до сборки нескольких предметов в
определённое место комнаты. Робот не имеет манипулятора – руки, и поэтому
перемещение предметов осуществляется простым их толканием по полу. Робот может
перемещаться по кратчайшему пути в заданное место помещения, вычисленному таким
образом, чтобы избежать столкновения с окружающими предметами. Робот “живёт” в
реальной среде простых объектов: коробок различной формы, дверных проёмов, стен
и т. д. Его зрительная система выделяет информацию о такой среде из стандартного
телевизионного изображения. Искусственный интеллект робота находится отдельно от
подвижной части. Это объясняется большими размерами ЭВМ того поколения. В
настоящее время установка бортовой ЭВМ (не контроллера) не является проблемой.
Космические роботы. Планетоходы.
В период до 1989 года человечеству было известно три модели планетоходов. Это
советские самоходные исследовательские аппараты “Луноход-1”, “Луноход-2” и американские типа
LRV. Они являются выдающимися образцами инженерного творчества. Опыт их создания
и эксплуатации на Луне дал богатый материал по принципам проектирования,
изготовления многих элементов
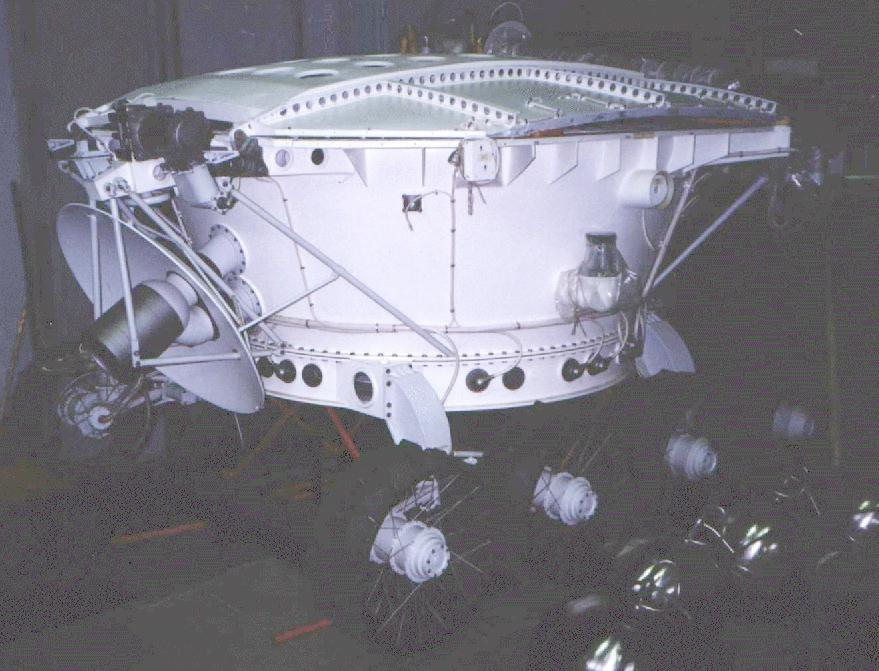
 конструкции и управления. Эти планетоходы являются
важнейшим этапом в создании космических роботов. “Луноход-1” представляет собой
круглый специальный контейнер круглой формы, установленный на самоходном шасси.
Герметический контейнер является основной частью конструкции, в нём размещена
аппаратура бортовых систем и защита её от воздействия внешней среды. На “Луноход-1” размещены научные
приборы, антенны, телекамеры и телефотометры, радиатор системы
терморегулирования, теплоизолирующей крышки с установленными на ней с внутренней
стороны солнечными батареями. Шасси “Луноход-1” предназначено для
перемещения аппарата по поверхности Луны. В состав его входят следующие агрегаты
и системы: ходовая часть, включающая восьмиколёсный движитнль и индивидуальную
эластичную подвеску колёс; электрическая трансмиссия с индивидуальным приводом
колёс; тормозная система; блок автоматики шасси; комплект
информационно-измерительной аппаратуры. Система электропитания лунохода,
выполненная по схеме генератор – буфферная аккумуляторная батарея, обеспечивает
питание всех бортовых систем постоянным током.
конструкции и управления. Эти планетоходы являются
важнейшим этапом в создании космических роботов. “Луноход-1” представляет собой
круглый специальный контейнер круглой формы, установленный на самоходном шасси.
Герметический контейнер является основной частью конструкции, в нём размещена
аппаратура бортовых систем и защита её от воздействия внешней среды. На “Луноход-1” размещены научные
приборы, антенны, телекамеры и телефотометры, радиатор системы
терморегулирования, теплоизолирующей крышки с установленными на ней с внутренней
стороны солнечными батареями. Шасси “Луноход-1” предназначено для
перемещения аппарата по поверхности Луны. В состав его входят следующие агрегаты
и системы: ходовая часть, включающая восьмиколёсный движитнль и индивидуальную
эластичную подвеску колёс; электрическая трансмиссия с индивидуальным приводом
колёс; тормозная система; блок автоматики шасси; комплект
информационно-измерительной аппаратуры. Система электропитания лунохода,
выполненная по схеме генератор – буфферная аккумуляторная батарея, обеспечивает
питание всех бортовых систем постоянным током.
|
Ключевые слова: Что такое робот? Обзоры роботов робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте