Подобное колбасе устройство, которое передвигается подобно амёбе, построили специалисты политехнического института Виржинии (Virginia Tech) во главе с Деннисом Гоном (Dennis Hong), о чьём роботе с колёсами-ногами мы недавно рассказывали.
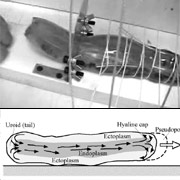
Принцип, используемый роботом, учёные назвали "цельнокожим передвижением" (Whole Skin Locomotion — WSL): вместо колёс или ног робот-амёба, чтобы переместиться, фактически выворачивает себя наизнанку — вся внешняя поверхность машины продвигает её вперёд.
"Тело" устройства покрыто гибкой мембраной — эта "кожа" сзади устройства постепенно стягивается к центру, "втекает" в полую сердцевину, двигается там в обратном направлении и "вытекает" спереди, чтобы вновь стать внешней поверхностью робота.
Любопытно, что помимо, собственно, движения по поверхности, упругий робот может "пролезть" в дырку вдвое меньшего, чем его тело диаметра.
Однако у гибкой поверхности есть свои недостатки: пока она не слишком износоустойчива, не защищена от проколов и порезов, что делает невозможным применения робота на "грубом ландшафте".
Гон вместе с коллегами уже видит пути решения этих проблем. Кое-какую информацию об искусственной амёбе со схемами и фотографиями вы сможете найти на 12-14-й страницах этого PDF-документа от NASA (1,3 мегабайта).
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте