Arduino Nano 3.0 распиновка » Роботы на платформе Ардуино
Платформа Ардуино Нано 3.0 построена на микроконтроллере ATmega328, имеет небольшие размеры и может использоваться в разных проектах. Питание устроено через разъем Mini-B USB. Все 14 цифровых выводов могут настраиваться как вход или выход...
В середине 2013 года я приобрёл плату Arduino Nano версии 3.0. Ясно, что плата построена по схожей
с полноценной ардуино уно платформе, но есть и нюансы. Попробуем в этой статье разобраться в них
Платформа Arduino Nano 3.0 построена на микроконтроллере ATmega328,
имеет небольшие размеры и может использоваться в разных проектах.
Nano разработана и продается компанией Gravitech.
Ниже привожу технические характеристики:
Микроконтроллер - ATmega328
Рабочее напряжение - 5 В
Входное напряжение (рекомендуемое) - 7-12 В
Входное напряжение (предельное) - 6-20 В
Цифровые Входы/Выходы - 14 (6 из них могут использоваться как выходы ШИМ)
Аналоговые входы - 8
Постоянный ток через вход/выход - 40 мА
Флеш-память - 32 Кб (при этом 2 Кб используются для загрузчика)
ОЗУ - 2 Кб
EEPROM - 1 Кб
Тактовая частота - 16 МГц
Размеры - 1.85 см x 4.3 см
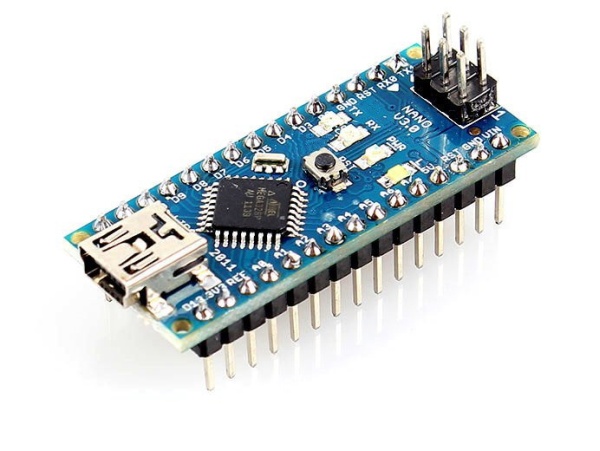
Вариант платы с припаянными ножками
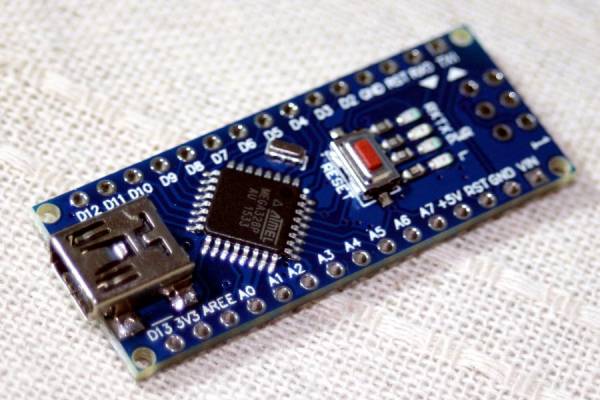
Вариант платы без ножек. Для любителей паять :-)
Arduino Nano получает питание через разъем Mini-B USB, а также от нерегулируемого 6-20 В (вывод 30) или регулируемого 5 В (вывод 27) внешнего источника питания. Автоматически выбирается источник с самым высоким напряжением.
Все 14 цифровых выводов (используя функции pinMode(), digitalWrite(), и digitalRead()) могут настраиваться как вход или выход. Выводы работают при напряжении 5 В. Каждый вывод имеет нагрузочный резистор (стандартно отключен) 20-50 кОм и может пропускать до 40 мА.
Возможно несколько способов связи с компьютером или другими устройствами и микроконтроллерами. ATmega328 поддерживает последовательный интерфейс UART TTL (5 В) через выводы 0 (RX) и 1 (TX). Микросхема FTDI FT232RL направляет данный интерфейс через USB, а драйверы FTDI предоставляют виртуальный COM порт программе ардуино на компьютере. Светодиоды RX и TX на платформе мигают при передаче данных только через микросхему FTDI или USB подключение.
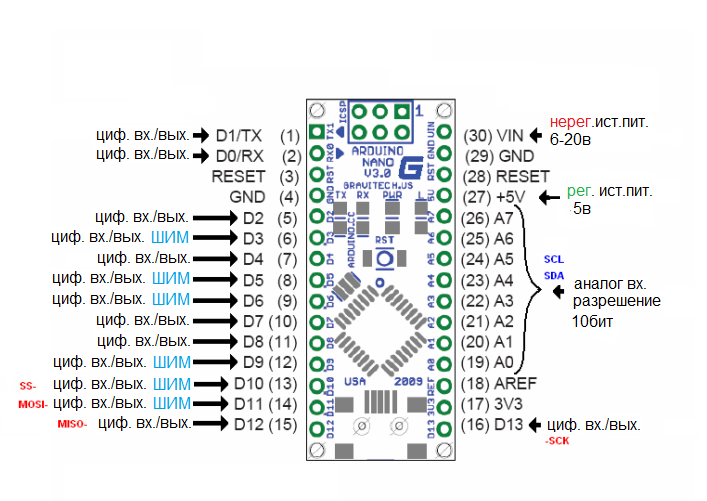
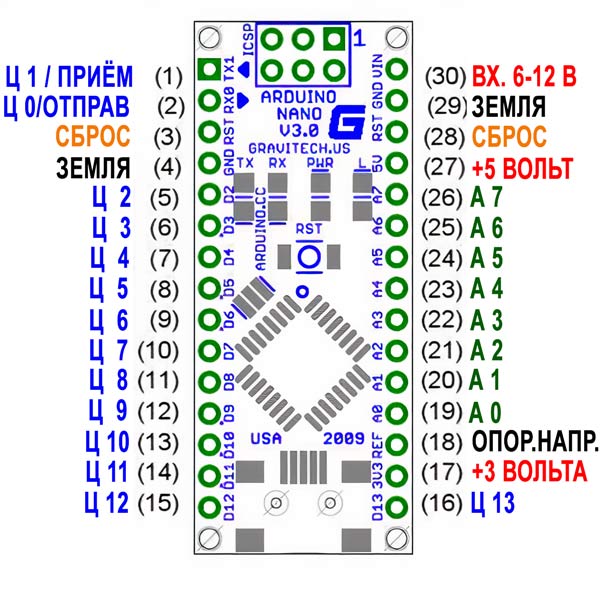
Распиновка всех портов Ардуино нано (arduino nano pinout)
Платформа программируется посредством ПО Arduino, свежую версию которого можно скачать с официального .
Но перед этим необходимо чтобы устройство определилось на вашем компьютере. Вот в этом моменте у меня и возникли сложности. При подключении Ардуино через USB шнур к компьютеру, в системе (Windows 7) платформа определилась как UART устройство. При этом автоматически драйвера не установились (драйвера можно скачать с сайта производителя чипов ).
Пришлось это сделать вручную. Для этого в диспетчере устройств надо выбрать неопознанное устройство. В свойствах выбрать пункт установить или обновить драйвер, а далее выбрать из списка уже установленных драйверов производителя FTDI модель USB serial converter. После установки драйвера появилось составное Usb устройство, и осталось только установить драйвер на порты COM и LTP. Точно таким же образом я выбрал драйвер того же производителя, и после этого моя Ардуина стала доступна для заливки скетчей.
Для проверки работоспособности откроем приложение для Arduino. На вкладке сервис (Tools), в меню плата (board) выбираем Arduino Nano w/ATmega328. Теперь скопируйте этот скетч себе в программу и нажмите кнопку загрузить.
/*
Мигание светодиодом SOS.
Слегка модифицированный стандартный скетч мигания светодиодом.
Имитирует сигнал SOS азбуки Морзе, повторяя поочередно три коротких вспышки,
три длинных, затем опять три коротких.
Подробнее здесь https://www.craft-tech.ru
*/
// Скетч включается при подаче питания, либо при нажатии кнопки reset
void setup() {
// работаем с 13 пином.
pinMode(13, OUTPUT);
}
После того как скетч скомпилируется и загрузится в ардуино,
светодиод на плате начнет моргать повторяя сигнал SOS азбуки Морзе.
Это будет означать что настройка прошла успешно.
Мы подготовили статью о самой популярной плате - UNO. Прочитать и посмотреть все параметры, включая распиновку
можно по этой ссылке: обзор платы Ардуино Уно.
На нашем сайте доступна подборка инструкций и учебных пособий по ардуино.
Ознакомиться и скачать можно в этом разделе:
Скачать инструкции - книги по ардуино.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте