От андроидов к Robo Sapiens?
20.04.2008, 14:01
Автор: Владимир Романченко (sai@3dnews.ru)

"Людям редко - а может быть, никогда - удается придумать Бога, действительно стоящего над ними. У большинства богов манеры и мораль испорченного ребенка".
Да простят строгие читатели эту фривольную цитату из книги "Достаточно времени для любви, или Жизни Лазаруса Лонга" покойного Роберта А. Хайнлайна, но, получается, не так-то просто начать разговор о том, что люди всё чаще и чаще вторгаются в традиционную область категории "божьего промысла". Даже когда речь заходит о простых и понятных вещах вроде атомной бомбы, поворота рек или техногенном изменении климата. Что уж там говорить, когда человек норовит создать существо по своему образу и подобию…
Образ и подобие. По-хорошему, сам по себе Homo Sapiens ещё изучен не до конца, а уж его предназначение или, если хотите, его Миссия – и подавно. Даже оставив в стороне вопросы морали, Добра и Зла, следует признать, что универсальнее человеческого существа ничего в природе не встречается. Тот же дедушка Хайнлайн (к слову, законченный индивидуалист) в вышеупомянутой книге так отзывался о сущности человеческой универсальности:
Человек должен уметь переменить пеленку, спланировать план вторжения, заколоть свинью, вести корабль, построить дом, написать сонет, подвести счета, построить стену, снять мясо с костей, утешить умирающего, отдать приказ, выполнить приказ, действовать вместе и в одиночку, решать уравнения, анализировать новую проблему, разбросать навоз, запрограммировать компьютер, приготовить вкусное блюдо, биться и победить, и умирать с достоинством.
Специализированны лишь насекомые.
Каждый из нас может соглашаться с этим "списком человеческих фич" или не соглашаться, но каждый может примерить список на себя и сделать выводы о собственной универсальности. Или "насекомости". Тезис о "насекомости", то есть специализированности (привет офисному планктону!), разумеется, в какой-то степени шутка, но, согласитесь, перед тем как создавать себе подобных или даже лучших, для начала есть смысл разобраться в самих себе.
Однако вернёмся к сути. Человечеству, освоившему массовое производство роботов-пылесосов, научившему машины справляться с комбинационной логикой шахмат и даже имитировать рукопожатие и женский вокал, можно гордиться достигнутым, но говорить о создании себе подобного рановато. Причин тому много, но даже если не вспоминать о далёких от совершенства имитаторах человеческих чувств, мимики, жестов и движений, остаётся главная проблема – имитация деятельности человеческого мозга. Который, несмотря на очевидное несовершенство и непредсказуемость, пока что является неоспоримым условием той самой человеческой "универсальности".
Хотелось бы, конечно, ещё немного помыслить на тему "зачем всё это нужно – имитировать человека", да, пожалуй, не сегодня; самое время перейти к свежим фактам. Мы уже неоднократно писали о том, что такой-то профессор в таком-то университете добился точнейшей имитации свойств человеческой кожи и мимики лица, а такой-то исследовательский коллектив при такой-то компании научил робота играть на трубе. Очевидно, что финансировать подобные разносторонние разработки из "одного кармана" для создания законченной "модели человека" не так-то просто. К тому же, собрать в одном месте в единый коллектив множество специалистов самых разных областей науки и техники для создания более-менее правдоподобного "человекоимитатора" достаточно проблематично.
Вот почему в сентябре 2004 года по инициативе ряда европейских научных школ и под патронажем Еврокомиссии был создан глобальный консорциум The RobotCub Project. Прежде чем подойти к новостной сути сегодняшней статьи, немного расскажу о самом проекте, оно того заслуживает.
Главной научной целью консорциума The RobotCub Project изначально определили "исследование когнитивной (обучаемой) манипуляции (жестикуляция, имитация движений, взаимодействие с помощью системы жестов), восприятие окружающей среды, передвижение и даже некоторое ассоциативное восприятие человеческой речи. Главной инженерной целью стало создание "гуманоидной платформы, общеупотребительной для всего научного сообщества".
Говоря проще, задуман своеобразный всепланетный открытый (!) стандарт на унифицированные узлы и компоненты для построения человекоподобных роботов. Человекоподобных именно во всех аспектах, включая столь деликатные, как алгоритмы самообучения и принятия решений на основе самостоятельных выводов ("умозаключений").
Нынче в консорциум входит 16 партнёров - одиннадцать из стран Европы, три из Японии и два из США. Координация проекта осуществляется Университетом Генуи (University of Genoa), основное финансирование производится Еврокомиссией. Сейчас на развитие проекта затрачено 8,5 млн евро, что выразилось в 1651 человеко-месяцев или 138 человеко-лет.
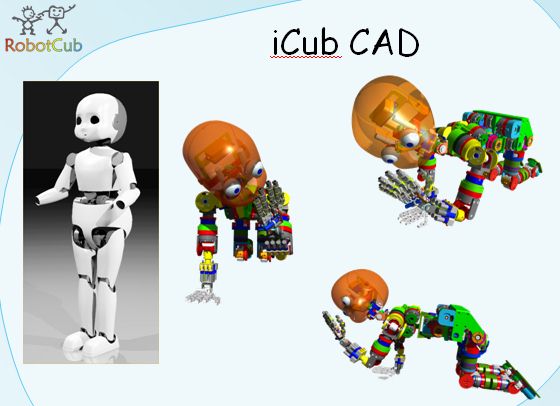
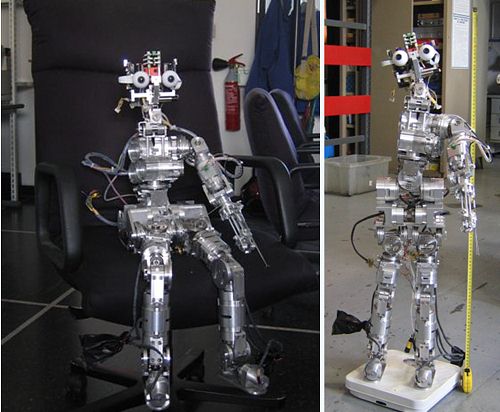
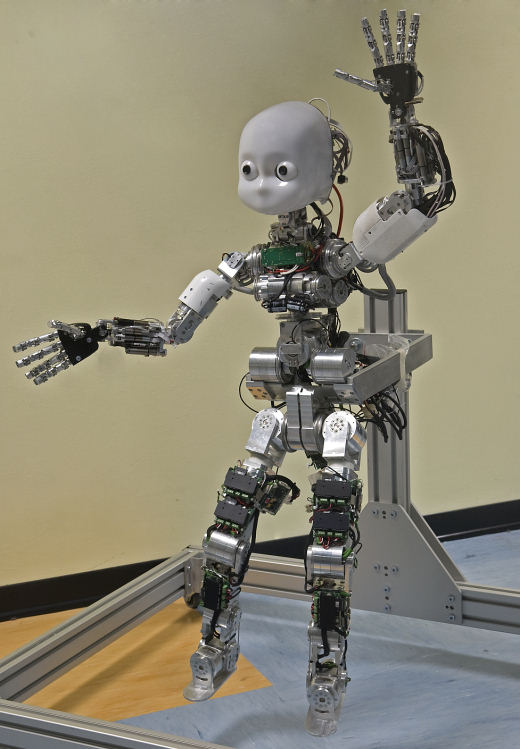
На первом этапе проекта учёные не стали замахиваться на максимум и, осознавая уровень сегодняшних технологий, и окрестили проект Humanoid Baby-robot iCub. То есть, при всей амбициозности проекта, iCub пока больше "гуманоидный робот-ребёнок", чем имитация взрослого человека, со всеми вытекающими отсюда скромными требованиями к интеллектуальным, самообучающимся, двигательным и другим функциям системы. Соответствующим выбран и рост бэби-робота iCub, который составляет всего 94 сантиметра – примерно как у 3-летнего ребёнка.
Среди других, заранее определённых возможностей бэби-робота, стоит упомянуть степень свободы 53°, в том числе, для кистей "рук" с шарнирными пальцами, используемых для манипуляций и жестикулирования. Робот должен, как минимум, ползать и садиться, самостоятельно переходя из одного состояния в другое и наоборот.
Наконец, всё, что касается этого робота, должно распространяться на основе общедоступной лицензии GPL/FDL (то есть с возможностью распространения и модификации, но с оставлением прав за автором и с требованием распространения модифицированных произведений по той же лицензии), в том числе, программное обеспечение, все аппаратные узлы и средства, чертежи, эскизы, документация и так далее.
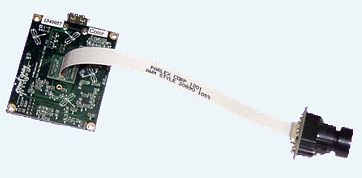
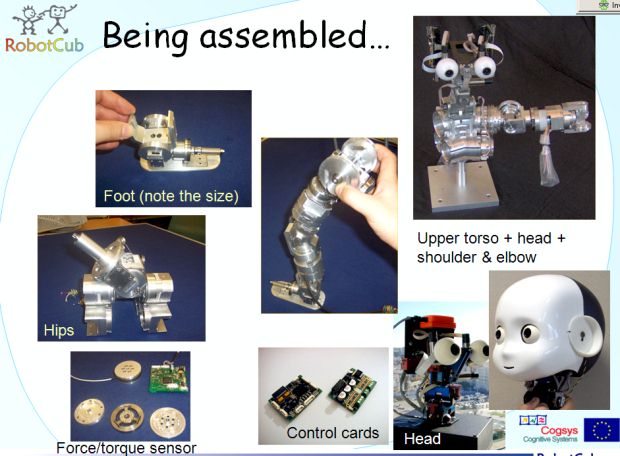
С ключевыми элементами основных "органов чувств" определились ещё на первом этапе спецификаций: "глазами" для iCub служат миниатюрные цветные 640x480 сенсоры.
В качестве "ушей" применяются стандартные миниатюрные электретные микрофоны.
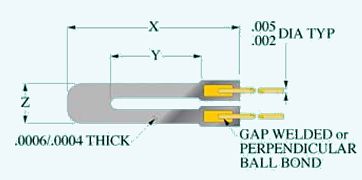
"Органами осязания" и чувствительными элементами "кожи" робота призваны стать несложные крохотные (0,67 мм) датчики силы и момента взаимодействия, при этом для кончиков пальцев должны применяться сенсоры трёхмерного типа, а в суставах – с возможностью измерения крутящего момента.
Значительное внимание также придаётся использованию гиро- и инерционных сенсоров.
Каркас конструкции со всей этой обвязкой датчиков, сенсоров, двигателей и других электромеханических элементов, безусловно, является важным и необходимым для подобного проекта. И всё же главное в разработке iCub – это уникальный программно-аппаратный комплекс, способный обучаться по мере развития бэби-робота и обладающий хоть какими-нибудь задатками интеллекта. Видите, на схеме ниже упоминается даже филогения - биологическая наука о родственных взаимоотношениях разных групп живых организмов.
Таким образом, перед научным сообществом была поставлена задача: "научить" платформу iCub основным "навыкам" по тому же принципу, по которому дети постигают мир – методом проб и ошибок, путём самостоятельного обучения.
Вот здесь мы подошли к самому интересному в сегодняшнем рассказе о проекте iCub. Полгода назад, в сентябре 2007 года, в лабораториях были созданы, протестированы и отлажены первые прототипы бэби-робота. Одновременно с этим между научными группами, входящими в консорциум The RobotCub Project, был объявлен конкурс, призванный выявить наиболее перспективные направления улучшения стандарта, наиболее интересные модели его применения и определить, каким группам есть смысл выделить финансирование на дальнейшие углублённые разработки и исследования. Совсем недавно были подведены итоги этого конкурса, выявлены победители и определены условия нового конкурса RobotCub.
Одним из шести победителей конкурса RobotCub стал Имперский колледж науки, техники и медицины при Лондонском университете (Imperial College London), учёные которого работали над одной из наиболее животрепещущих тем – поиском путей переноса принципа работы "зеркальных нейронов" человеческого мозга в цифровую форму. Зеркальные нейроны, открытые в начале 1990-х годов – это особый класс нервных клеток, этакая триггерная память жизненного опыта, попыток оценить физическое поведение других людей. Именно благодаря зеркальным нейронам человек может распознавать намерения и эмоции других людей.
В то же время, другая группа исследователей из барселонского Университета (Universitat Pompeu Fabra (UPF)) провела успешные исследования и разработку интегрированной антропоморфной нейроморфической системы, которая станет одним из ключевых элементов когнитивной (обучаемой) архитектуры "интеллекта" iCub.
Ещё одни финалисты конкурса – группа из парижского Университета Пьера и Мари Кюри (Université Pierre et Marie Curie) - занималась исследованием моторных и динамических систем для обеспечения полного контроля над "телом" iCub (перефразируя такое трудное определение на человеческий язык, я бы назвал это прообразом "вегетативной нервной системы роботов").
Разработкой обучающих навыков для "опорно-двигательного аппарата" системы занимались учёные из Мюнхенского технического университета (Technischen Universität München), им удалось достичь определённых успехов в обучении iCub основным двигательным движениям.
Группа исследователей из Национального центра научных исследований (Centre National de la Recherche Scientifique, CNRS) и Лионского университета Люмьера (Université Lumiere Lyon) занималась разработкой концепции распределённых "мыслительных процессов" и самоанализа поведения робота-гуманоида в зависимости от сложившейся ситуации. Именно этот процесс происходит в наших мозгах при анализе и планировании последующих действий для каждой жизненной ситуации или в попытке понять и предугадать действия окружающих.
Наконец, ещё одна команда исследователей из Ближневосточного технического университета (Middle East Technical University, METU) в Анкаре, Турция, сфокусировала внимание на острейшей и практически эксклюзивной проблеме – языковому обучению системы iCub, его способности ассоциировать окружающие объекты и образы с вербальными (устными) словоформами и звуками. То есть фактически они разрабатывали сенсомоторику всего речевого тракта – от восприятия до воспроизведения, что станет основой для "общения" системы iCub с внешним миром.
В настоящее время система iCub представляет собой почти метрового робота с достаточно шустрыми "руками" и вполне "осмысленными" движениями головы и глаз. Уже на нынешнем этапе робот обладает неплохим "слухом", "осязанием" и способен ползать на четвереньках, а также сидеть выпрямившись. Люди, работающие над "внутренним миром" iCub, делают всё возможное, чтобы робот мог воспринимать внешний мир, анализировать его проявления и взаимодействовать с ним на основе имеющегося "жизненного опыта" – примерно как маленькие дети, которые накапливают знания об окружающем мире путём проб и ошибок, путём подражаний и копирования поведения окружающих. Интересный видеоролик, снятый недавно на конференции CogSys 2008 В Карлсруэ и иллюстрирующий попытки iCub научиться стучать на барабанах в так музыке, можно скачать здесь (4,8 Мб).
Основным плюсом системы iCub в консорциуме Robotcub считают модульную сущность аппаратных и программных элементов проекта. Распределение труда над различными элементами даёт возможность ускорить развитие проекта, плюс, гибко изменять или заменять отдельные элементы в случае необходимости. Более того, модульный дизайн проекта позволяет заниматься разработкой разных элементов системы большому числу независимых разработчиков, благо, чертежи, исходные коды ПО и техническая документация iCub бесплатны и доступны каждому желающему. Прямо как Linux.
Что касается следующей фазы разработки платформы iCub, участники проекта разумно договорились не изменять уже имеющийся дизайн аппаратных и механических компонентов на протяжении как минимум ближайших 18 месяцев, благо, надо "софтом" ещё работать и работать.
Тем более, что по достижении определённых успехов в самообучении системы, предполагается вложить в "интеллект" iCub некоторые "врождённые" навыки – если хотите, можно называть их врождёнными инстинктами, а это уже совершенно другой уровень исследований. К числу таких "врождённых инстинктов" можно отнести, например, способность отслеживать перемещение объектов визуально или с помощью "слуха", с некоторыми элементами прогнозирования пункта назначения перемещающегося объекта. Помимо этого, бэби-робот iCub также научится определять своё местонахождение и визуально ориентироваться в пространстве.
И всё же важнейшей ключевой целью, поставленной перед разработчиками, является обучение робота iCub достигать определённой точки. Имеется в виду, что на текущем этапе, который продлится примерно до октября 2008 года, разработчики iCub планируют закончить "обучение" робота анализу информации, получаемой всеми его "органами чувств", включая "зрение". Таким образом, предполагается, что результат анализа информации позволит роботу осуществлять "самостоятельное" принятие простейших решений, вроде подползания к указанному объекту и "ощупывания" его "пальцами".
Финальной целью нынешнего этапа разработки является сборка шести действующих роботов iCub. Затем бэби-робот будет воспроизведён в количестве полутора-двух десятков, и каждый из них поступит в распоряжение остальных участников проекта по всему миру.
Как видите, путь, который предстоит пройти электронно-механическому "болвану" от андроида-попугая до Robo Sapiens, отнюдь не близкий. Времена, когда появится человеко-робот, которому можно приказать сбегать за молоком и фруктами, попутно купить в ларьке лимонада, на сдачу взять специй, и при этом вполне обоснованно попросить его не занудничать с глупыми вопросами вроде "что делать, если не будет бананов или они окажутся по другой цене". Что-что, сам думай, ты же из нас двоих железный калькулятор.
А как же "глупые" роботы-пылесосы? Тупиковая ветвь робо-эволюции? Вряд ли, им всегда найдётся работёнка – и по дому, и в сборочных цехах, там, где можно обойтись без намёков интеллекта и требуются лишь нехитрые манипуляции по чётко отработанному алгоритму. Но, скажем, железкам, не способным "…утешить умирающего, отдать приказ, выполнить приказ, действовать вместе и в одиночку…" и так далее по цитате, приведённой в начале статьи, в марсианской экспедиции делать нечего.
|
Ключевые слова: iCub гуманоидной платформы гуманоид имитация свойств RobotCub Project анализ информации Homo Sapiens От андроидов к Robo Sapiens? Андроиды робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте