28.01.2012, 15:26
membrana.ru
Чтобы исследовать функцию хвоста как динамического стабилизатора, биологи и инженеры из Калифорнийского университета в Беркли заставили прыгать ящерицу, а также построили компьютерную модель велоцираптора и изготовили робота-прыгуна.

Первым делом учёные поработали с ящерицей вида Agama agama. Как сообщает New Scientist, агама должна была прыгать на вертикальную поверхность, отталкиваясь от платформы с различным сцеплением, а экспериментаторы снимали ящерицу на высокоскоростную видеокамеру. Если было скользко, агама прыгала под неправильным углом, но исправляла погрешность в полёте.
«Ящерица осуществляет контролируемые взмахи хвостом, перенаправляя угловой момент от своего тела на придаток, стабилизируя себя в сагиттальной плоскости», – пишут учёные в статье, которую опубликовал журнал Nature.

"Мы впервые показали, что ящерицы качают хвостом вверх или вниз, чтобы предотвратить вращение своего тела. Если бы речь шла о летательных аппаратах, я бы назвал это управлением тангажом, – объяснил ведущий автор работы Роберт Фулл (Robert J. Full), известный по схожим опытам с гекконами. – Созданная нами на основе этих наблюдений компьютерная модель велоцираптора свидетельствует, что динозавры могли использовать свой хвост таким же образом, а возможно, даже более эффективно".
В продолжение исследования коллеги Фулла из биоинженерного центра CiBER изготовили колёсного робота по имени Tailbot, которому приделали хвост, чтобы он имитировал прыжки ящерицы.
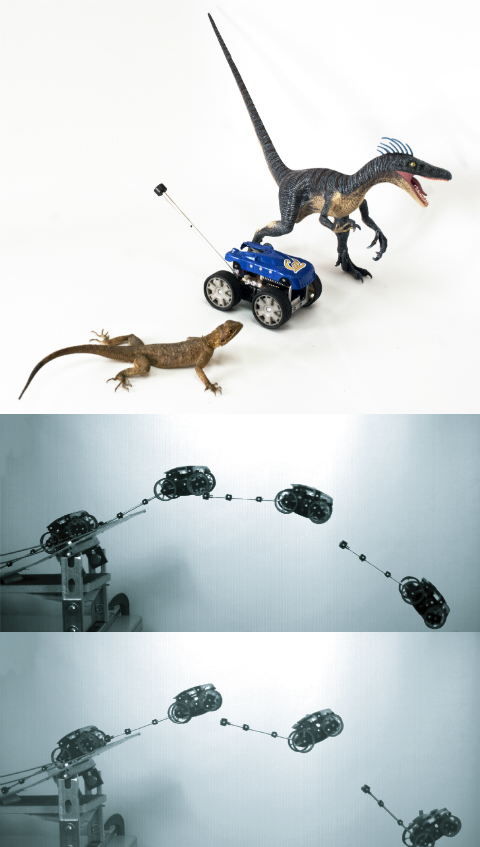
Когда искусственный хвост машинки был активным, то есть робот получал обратную связь от датчиков, чтобы ощущать своё положение в пространстве и двигать придатком, – посадка была успешной. Если же хвост был пассивен, Tailbot врезался в землю носом, из чего учёные сделали соответствующие выводы.
"Агама и Tailbot, вероятно, помогут нам сделать более гибких поисково-спасательных роботов, имеющих больше возможностей для быстрого обнаружения химических, биологических или ядерных опасностей", – заявил доктор Фулл.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
