Гуманоидный робот PICO-2 для телеприсутствия способен повторять жесты
27.06.2011, 19:25
Автор: Артем Терехов (news@3dnews.ru)
Синергия практика как делать отчет по учебной практике мфпу синергия.
Исследователи из Университета Кюсю (Kyushu University) посчитали, что их
старенькому роботу Fujitsu HOAP-2 не помешает обновление. Так на свет появилась
университетская модификация HOAP-2 под названием PICO-2 (proactive interface
robot). Голова машины подверглась замене, что увеличило вес до 8,7 кг, а рост –
до 64 см.
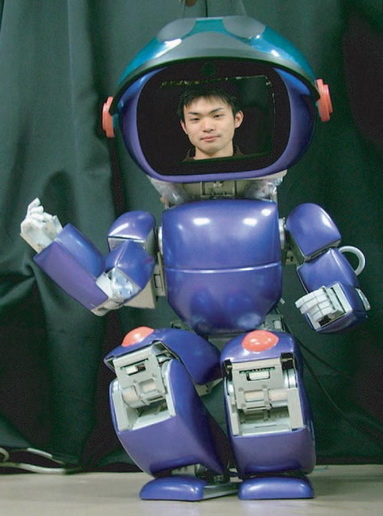
В голове расположился ЖК-экран, динамик и микрофон.
Вместе с названием значительно изменился дизайн робота, в котором теперь
преобладают плавные округлые формы, делающие PICO-2 похожим на карикатурного
космонавта. Робот предназначен для телеприсутствия – к слову, это одна из
немногих машин такого класса, способных похвастаться полноценным гуманоидным
строением.
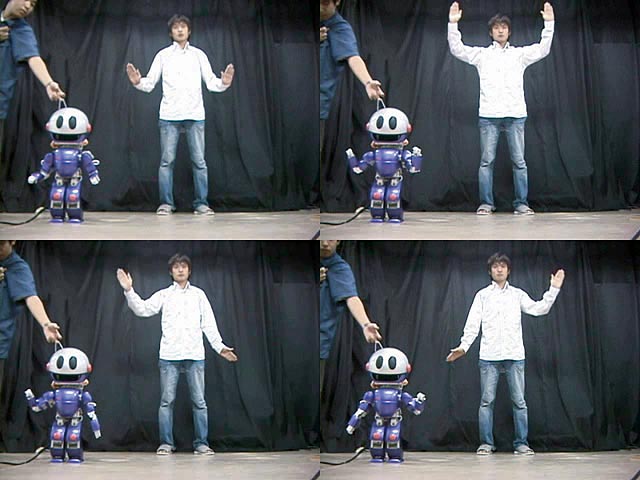
Строение PICO-2 позволяет не только отображать лицо
пользователя на экране, но и повторять его жесты, а также ходить или танцевать.
Ответственная за это технология была разработана еще в 2005 году, до выхода
Kinect, но работает она как минимум не хуже. Принцип следующий – сначала
положение тела пользователя определяется по его силуэту на изображениях,
полученных монокулярной камерой робота, а затем система проецирует
проанализированное положение на цифрового аватара. После чего робот физически
повторяет движения, совершаемые цифровым аватаром. Весь процесс занимает чуть
больше 30 миллисекунд, так что невербальное общение происходит практически в
реальном времени.
Весьма любопытно на примере PICO-2 проследить за тем, как
роботехники подходят к вопросу энергопотребления сервомоторов во время движения
и делают соответствующие шаги для оптимизации процесса. Вы наверняка замечали,
что большинство гуманоидных роботов передвигаются на согнутых коленях – это
выглядит неестественно, однако помогает опустить центр масс как можно ниже, что
положительно влияет на стабильность, но заметно увеличивает энергопотребление.
После проведенных симуляций разработчикам удалось применить к PICO-2 схему
перемещения на прямых ногах – из-за меньшего крутящего момента, нужного для
движения, удалось умерить аппетит сервомоторов почти наполовину.
|
Ключевые слова: пользователя движения сервомоторов телеприсутствия повторять в реальном времени практически происходит миллисекунд энергопотребления роботехники проследить процесс проецирует Человекоподобные роботы робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте

