Robotino — робот для обучения и исследования » Роботы своими руками
Предлагаю вашему внимаю небольшой ознакомительный технический обзор робота Robotino® производства фирмы Festo Didactic. Обзор состоит из общей технической информации и деталей, которые получены в ходе проведений экспериментов и исследований с данным роботом.
Предлагаю вашему внимаю небольшой ознакомительный технический обзор робота Robotino® производства фирмы Festo Didactic. Обзор состоит из общей технической информации и деталей, которые получены в ходе проведений экспериментов и исследований с данным роботом.
Мобильный робот Robotino представляет собой автономную подвижную платформу c тремя роликонесущими колесами типа “omnidirectional” (действующий по всем направлениям, всенаправленный). Движение робота осуществляется за счет трех двигателей постоянного тока, оси которых расположены под углом 120 градусов друг к другу. Благодаря такой конструкции данный робот способен перемещаться во всех направлениях на плоскости движения, с возможностью поворота вокруг своей оси, проходящий через его геометрический центр на 360 градусов.
Технология привода
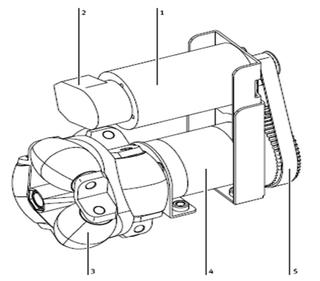
Интересной конструктивной особенностью является технология привода, а именно геометрия, которая представляет из себя следующую конструкцию:
Где цифрами обозначено: 1 – двигатель, 2 – тахометр, 3 – ролик, 4 – редуктор, 5 – ременная передача.
Скорость вращения вала каждого из двигателей передаётся на ось соответствующего колёса с помощью редуктора с передаточным отношением 16:1. Кроме того, измерение угловых скоростей вращения валов двигателей, осуществляется с помощью инкрементных тахометров, а линейные скорости движения робота по трём направлениям: вперёд, в сторону и поворот вокруг своей оси пересчитываются соответствующим образом по измерениям угловых скоростей двигателей.
Управление
Управление роботом можно осуществлять дистанционно по каналу беспроводной связи WLAN, а также с помощью заранее подготовленных программ, записанных в память робота. Работа в автономном режиме обеспечивается аккумуляторными батареями. Robotino работает под управлением встроенной операционной системы (ОС) Linux. Имеется набор функций (команд), позволяющих задавать и измерять угловые скорости вращения валов двигателей, а также линейные скорости движения робота.
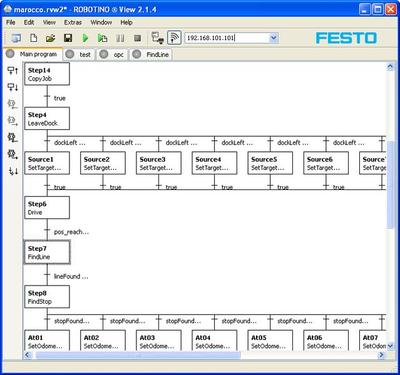
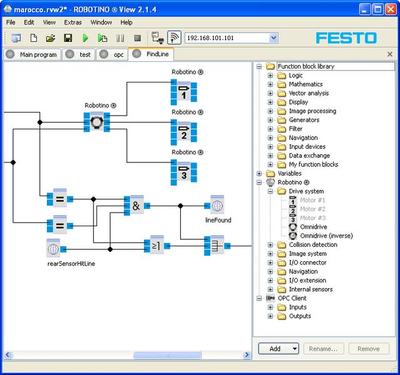
Робот поставляется в комплекте с RobotinoView — программным обеспечением с графическим интерфейсом, которое показывает состояние управляющих сигналов, датчиков, входов и выходов. Программа для робота может быть написана на основе выбора необходимых функциональных блоков из имеющегося списка, их комбинирования и настройки в графическом режиме, задания математических параметров управления с помощью функций и коэффициентов (визуальное программирование). Программирование RobotinoView возможно с помощью языков высокого уровня C++ APL для Windows и C++ APL для Linux. Возможно автономное программирование робота при подключении к нему монитора и клавиатуры.
Аппаратная часть
Аппаратная часть Robotino состоит из следующих подсистем: 1. # Система питания — аккумуляторные батареи, зарядное устройство, позволяющая роботу работать в автономной режиме несколько часов. 2. Двигательная система – три двигателя постоянного тока, редуктор, роликонесущие колёса, позволяющая роботу двигаться в различных направлениях, ременная передача. При этом следует отметить, что для стабилизации скоростей вращения вала каждого из трёх двигателей робота используются встроенные пропорционально — интегрально – дифференциальные (ПИД) регуляторы с предустановленными коэффициентами. 3.# Измерительная система (тахометры) для измерения скоростей вращения двигателей. 4. # Беспроводная система связи с внешним управляющим компьютером (Wi-Fi точка доступа). 5. # Встроенный управляющий компьютер, осуществляющий взаимодействие всех систем робота состоит из двух компонентов: процессор PC 104, совместимый с MOPSlcdVE, 300 МГц и компактной flash-карта (1024 MB). 6. # Монтажная плата ввода / вывода устанавливает коммуникационную связь между компьютером и датчиками, двигателем и интерфейсом ввода/вывода с Robotino.
Программное обеспечение робота можно разделить на 2 типа: внутреннее и внешнее. К внутреннему программному обеспечению относятся:
1. # Операционная система (ОС) Linux, осуществляющая взаимодействие аппаратного и программного обеспечения, обработку внутренних команд и обмен данными с внешним управляющим компьютером.
2.# Программы, хранящиеся в памяти робота для автономного управления.
К внешнему программному обеспечению относятся:
1. # Программы, использующие классы C++, С# с набором методов для связи и обмена данными с Robotino. 2.# Среда визуального проектирования Matlab/Simulink с загруженной библиотекой для управления роботом. 3. # Среда визуального проектирования RobotinoView. 4. Виртуальный симулятор RobotinoSim обеспечивающий возможность работать не с реальным Robotino, а с его виртуальной копией.
Вместо заключения, робот в действии
Ключевые слова:
Робот для исследования
двигатели
Robotino
система скоростей
RobotinoView
Linux
управление
валы
привода
Роботы своими руками
робот
Самодельный робот-магнит в виде гигантской божьей коровки
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте