26.01.2011, 09:18
Источник: автор: Рудаков Г. В.
Обычно, в статьях, я стараюсь излагать материал в порядке его разработки, но думаю, что это не тот случай. Поэтому, пропустим этапы проектирования принципиальной электрической схемы, разводки печатной платы и всего прочего. На рисунке 1 смотрим какое «безобразие» у меня получилось.

С первого взгляда кажется просто нагромождением железа, электроники и проводов. Наверное, это потому, что в ход пошли куски разнородных материалов. Давайте разбираться.
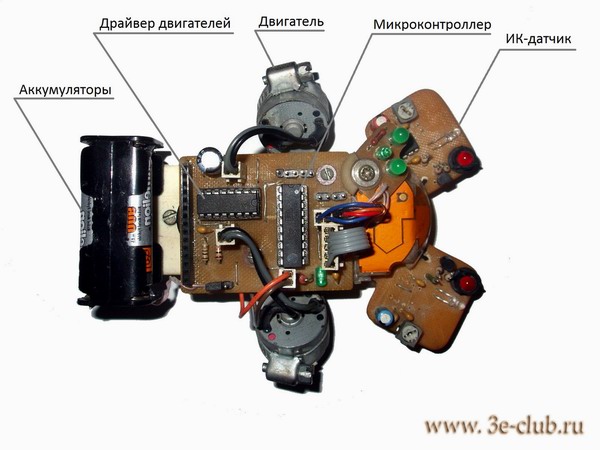
Теперь все по порядку. На микроконтроллер Attiny2313 с двух инфракрасных датчиков поступает сигнал о препятствии (логическая единица или нуль). Затем, согласно, прошивки микроконтроллер управляет микросхемой драйвер двигателя L293D (ток управления до 1 Ампера). На рисунке 3 представлена фотография перевернутого робота.
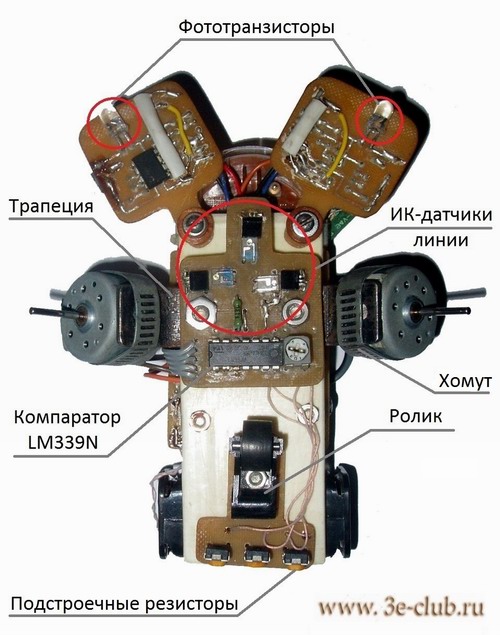
Основой конструкции самодельного робота является согнутая в трапецию металлическая полоска. Угол изгиба порядка 120°. Принципиально важно, чтобы с обеих сторон получился одинаковый изгиб, иначе робот будет двигаться не прямолинейно. Хотя, с другой стороны, что плохо сделал механик или электроник, иногда может загладить программист, скажем, с помощью ШИМ добиться прямолинейного движения робота
Из курса школьной геометрии все мы знаем, что плоскость образуется или тремя точками или прямой и точкой в пространстве. Третей точкой является свободно вращающееся роликовое колесо.
Приемники ИК-датчиков, фототранзисторы находятся снизу, дабы снизить засветку и свести к минимуму ложное срабатывание. Сами ИК-датчики крепятся на подвижных шарнирах, что позволяет производить настройку зоны сканирования. Интересная, кстати, реакции была моего кота на ползающего робота в коридоре ?. Кот у меня черный. ИК-датчики я настраивал серого цвета обои, поэтому робот поворачивал перед котом почти в самый последний момент, а кот отпрыгивал на шаг назад с громким шипением.
Следующий моддингом для роботы стали ИК-датчики на его пузе, позволяющие роботу следовать по черной линии, нарисованной на белой бумаге маркером. Для реализации потребовалось три датчика и компаратор на микросхеме LM339N, чтобы разгрузить микроконтроллер. Существенным минусом оказалось, необходимая предварительная настройка датчиков подстроечными резисторами в зависимости от освещения в помещении.
P.S. Наградой за потраченное время на создание бессмысленного устройства, пожалуй, будет наглядность работы микроконтроллера и память которая будет пылиться на полке, до тех пор пока ей может быть не заинтересуется чей то ребенок.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте