12.07.2010, 19:54
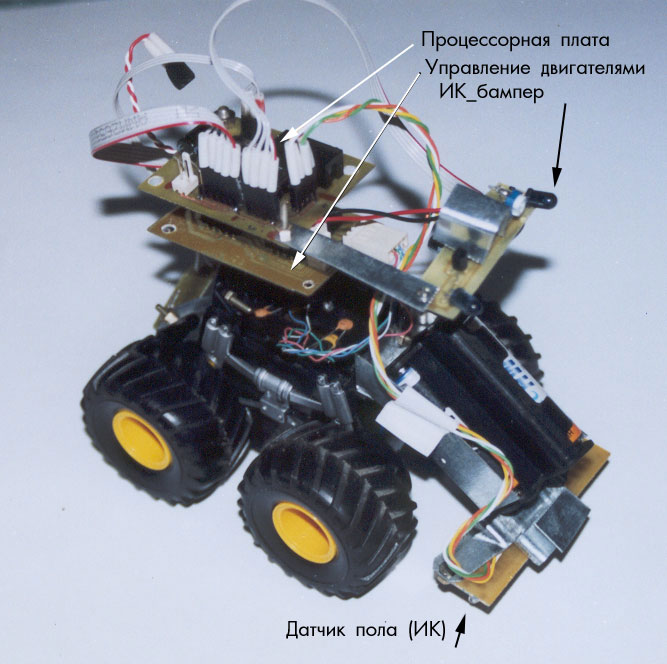
05.11.2004 Фотографии в хорошем качестве с комментариями.
17.12.2004г. Новый вариант робота на основе автомобиля Монстр-1
31.10.2004г.
Этот робот появился впервые в проекте мини-сумо как спарринг-партнер для робота-сумоиста.
Однако для отладки различных схем необходим был мобильный робот. За основу
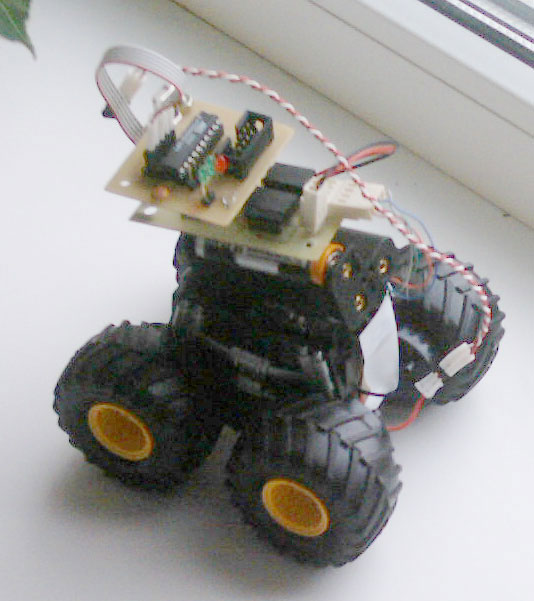
был взят автомобиль Монстр-1 который имеет следующие характеристики:
- 2 двигателя 2-4В
- редуктор с приводом на все колеса. колеса соединены парами- слева пара колес,
и справа пара, которые соединены редуктором с двигателем и вращаются синхронно.
- широкие резиновые колеса, полые внутри с протектором.
- корпус из пластмассы, которых легко сверлится и клеится.
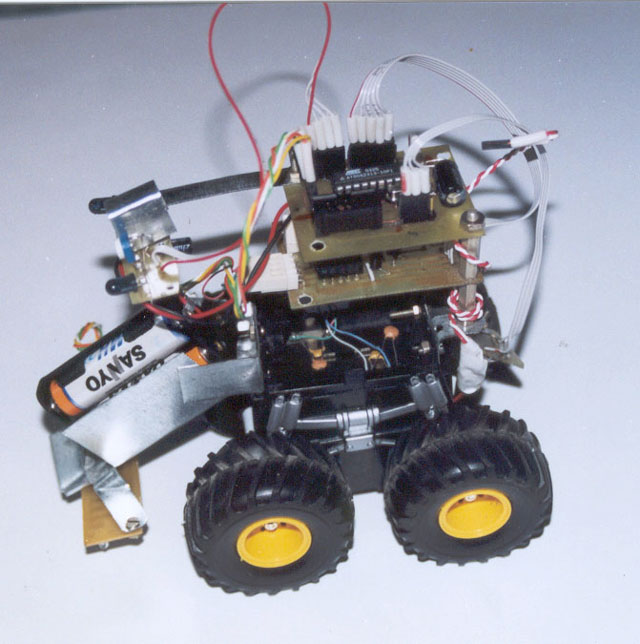
Вот одна из первых фотографий робота:
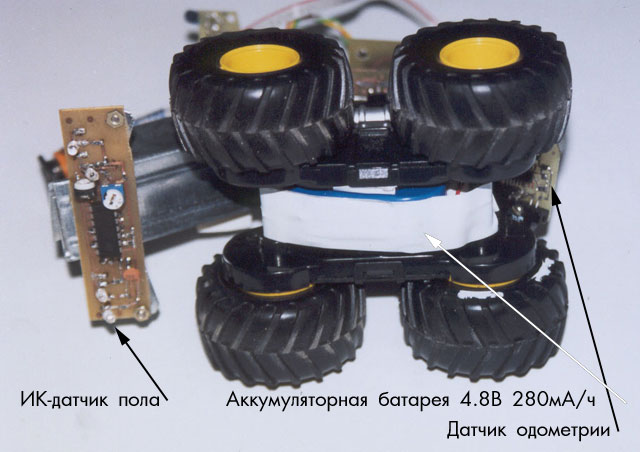
Так как для нормальной работы схем необходимо 2 типа питания: 5В для схем
управления и датчиков и 2-4 В для двигателей, было принято решение установить
2 источника питания: один состоит из 4-х аккумуляторов 1.2В 250мА/ч (сборка),
а для питания двигателей подключается либо 2 либо 3 аккумулятора по 1.2В (тип
АА). Питание двигателей осуществлялось при помощи аккумуляторов различных типов
и емкостей, от NiCd 600мА/ч до 2100 NiMh. Конечно же, метал-гидридные аккумуляторы
показали себя с лучшей стороны. Сборка 4-х аккумуляторов находится между колес
робота, что достаточно удобно.
Далее приводятся некоторые схемы:
Плата управления коллекторными двигателями на основе реле:
резисторы перед базой транзистора я брал 1к. Вы можете подбирать сами. Транзистор
можно взять любой маломощный n-p-n-типа. КТ3102 или КТ315, например, тоже подойдут.
Плата ИК-бампера
Транзистор аналогично верхней схеме, ИК- светодиоды- TSAL5100. Они диаметром
5 мм, мощность использована не более 20%, поэтому можно взять менее мощные
светодиоды.
Плата управления на основе AT90S2313-10PI:
Конденсатор С1 на самом деле кварцевый резонатор, но по размеру подходил именно
этот. Резистор R2- это SMD-светодиод на плате. Все резисторы и конденсаторы,
кроме электролитического, в SMD-исполнении.
Разъем SL2 предназначен для подключения платы управления двигателями. Остальные
разъемы- для подключения различных датчиков: ИК-бампера, датчика вращения колес,
датчика пола (для сумо-робота).
Датчик вращения колес (одометрии) очень простой, схему можете посмотреть здесь:
Взят, правда, только один канал, а на схеме 4. Но ведь и датчиков может понадобиться
4. Микросхема- компаратор LM339 (139, 239) или аналог. Приемник и передатчик
взят готовый- датчик на отражение. Подстроечным SMD-потенциометром мы выставляем
такое напряжение, при котором датчик срабатывает наиболее уверенно. Он получился
не очень маленький, но на роботе установился легко.
Вот фотографии:
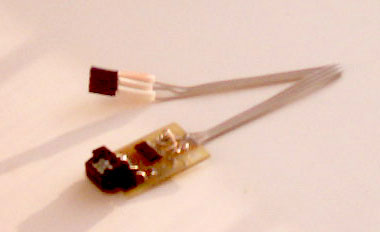
датчик вращения колес. Черный- это ИК-датчик, работающий на отражение. Видна
микросхема и подстроечный резистор. Обещаю в скором времени обновить все фотографии
в хорошем качестве.
05.11.2004 Фотографии в хорошем качестве с комментариями.
 667х664
(79кб), 320х320
(24кб) 667х664
(79кб), 320х320
(24кб)
 640х452(54кб) , 320х226
(18кб) 640х452(54кб) , 320х226
(18кб)
 640х644(72кб), 320х322(23кб) 640х644(72кб), 320х322(23кб)
program1.txt Вариант программы для этого робота. Очень сырой вариант. В последний
раз тестировал его на плате с частотой 8МГц, поэтому стоят константы для этой
частоты.
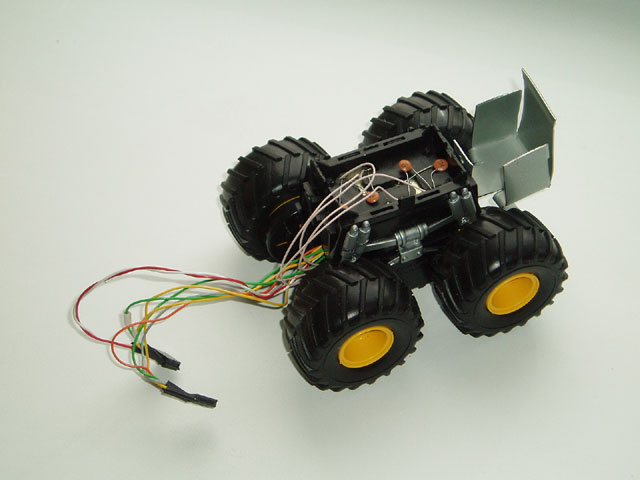
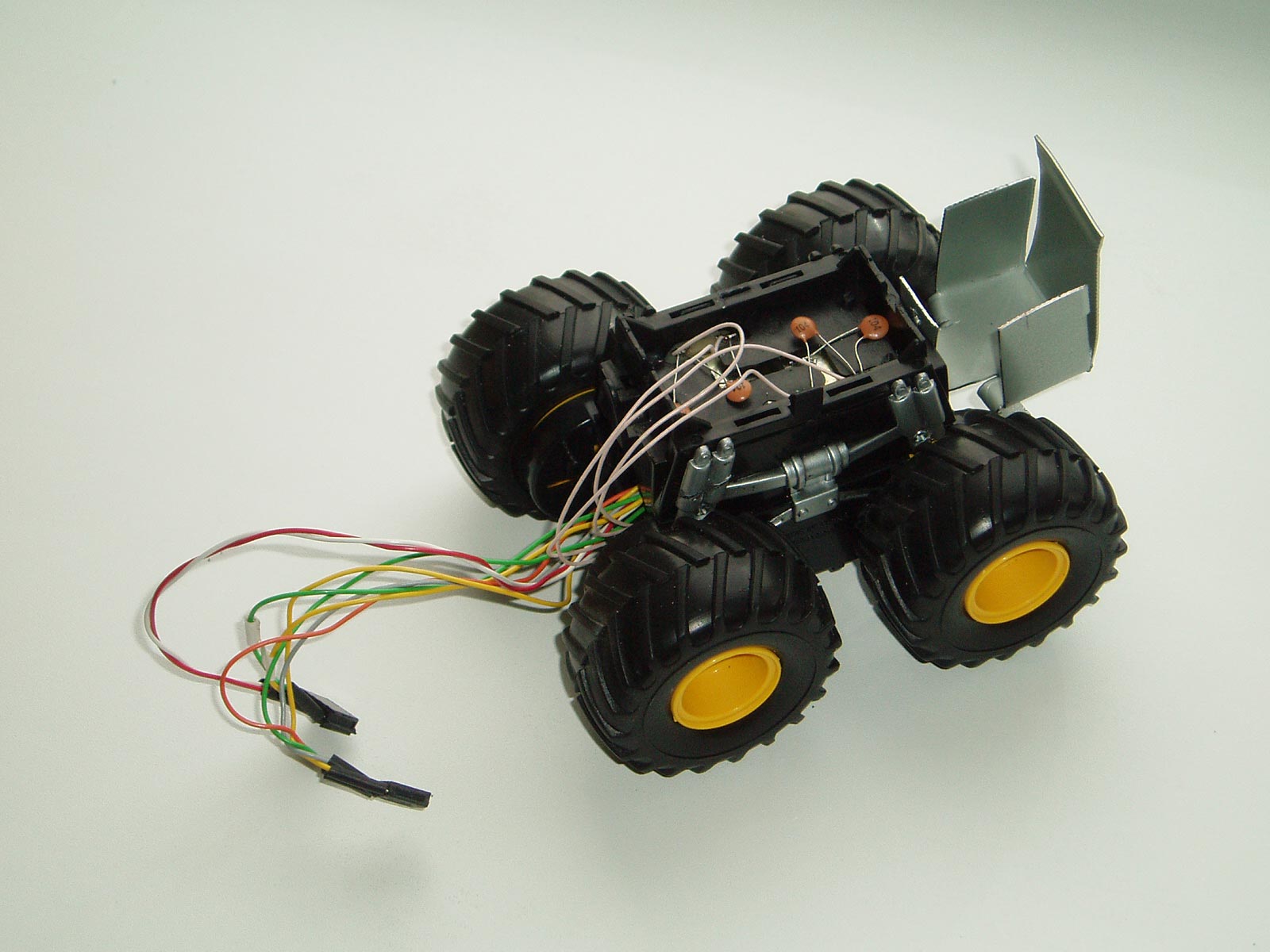
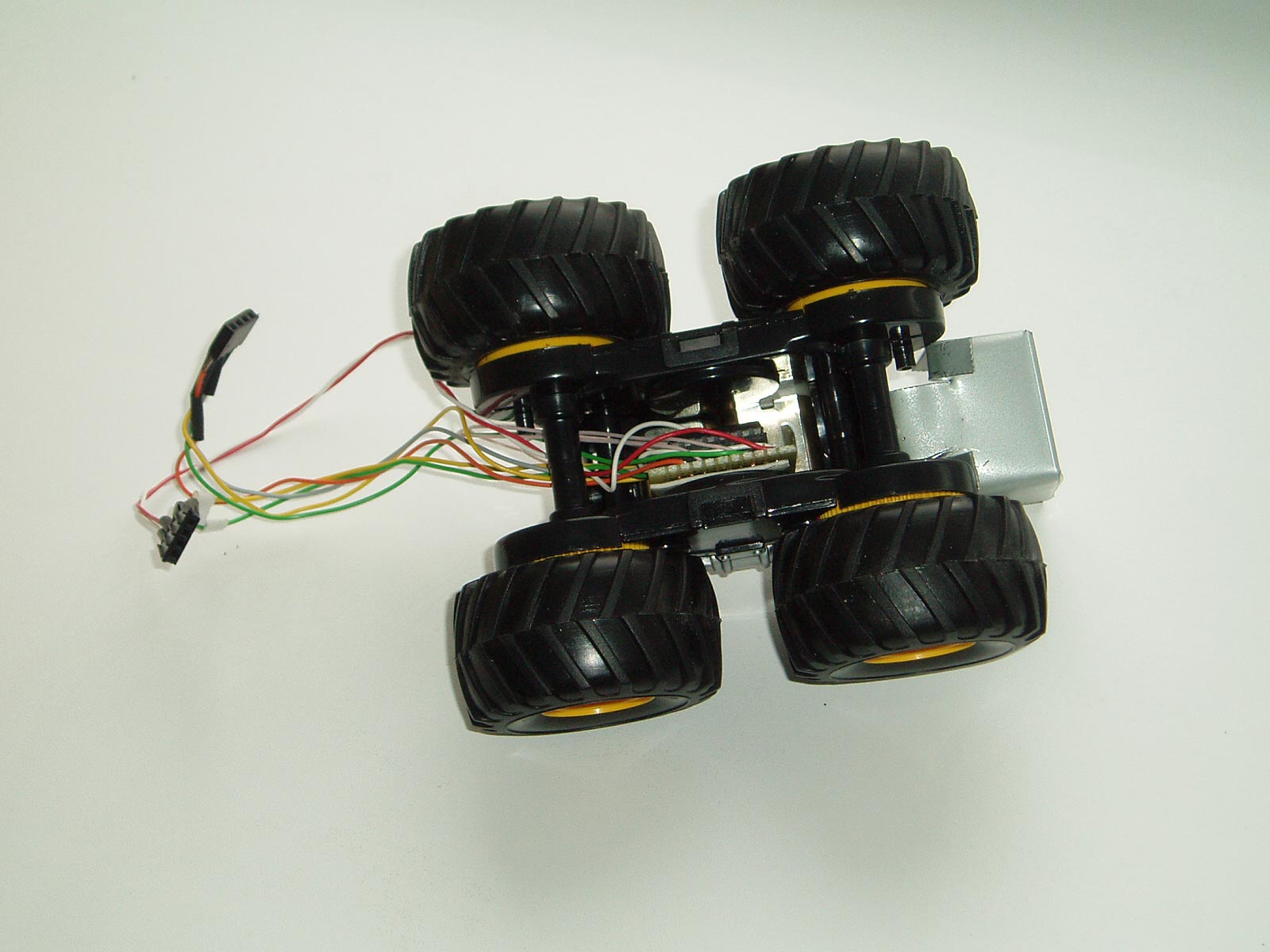
17.12.2004г. Новый вариант робота на основе автомобиля Монстр-1
Первый робот на базе Монстр-1 может быть неплохим сумоистом, также при использовании
более информативного датчика края может следовать по линии. Однако
хотелось создать на основе автомобильчика более "продвинутую" платформу, к
которой подключалась
бы только плата управления (мозг) робота, аккумуляторы и датчики.
Вначале я убрал все лишнее, подпаял к двигателям конденсаторы 0.1 мкФ, ну
и конечно проверил сами двигатели на работоспособность. Все работало нормально.
Далее, взяв кусок узкой монтажной платы, я впаял в нее микросхему L293D, подпаял
все необходимые проводки и разместил плату между колесами.
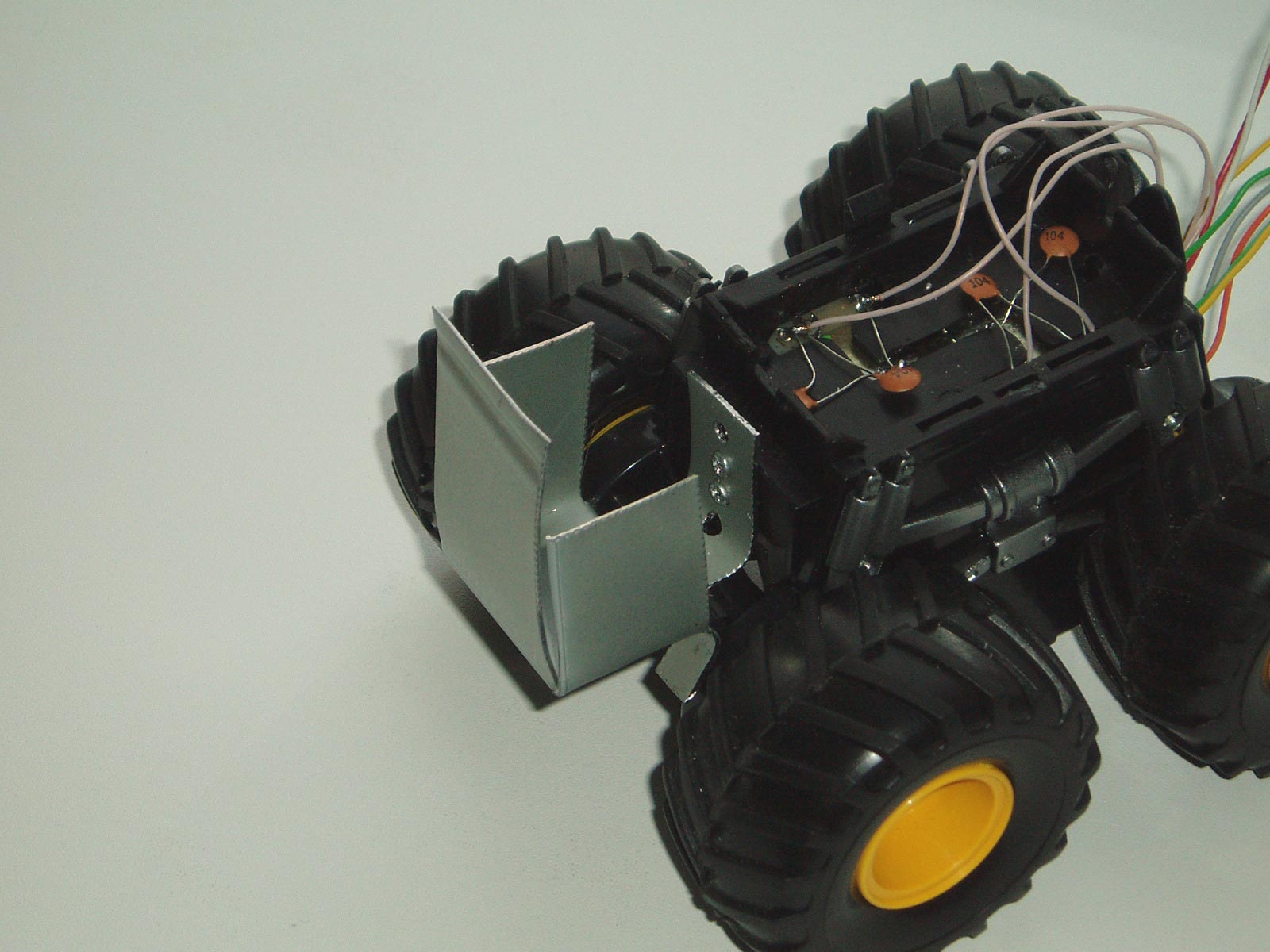
Самым неприятным моментом в тестировании роботов являются аккумуляторы. Во-первых,
их нужно как-то закреплять, иначе они сваливаются на пол в самый неожиданный
момент, что не очень приятно. Поэтому, используя ножницы по металлу, бумагу,
карандаш, линейку, я сделал сначала чертеж робота на бумаге, вырезал из бумаги то,
что я задумал, примерил на платформе, а потом, просто приложив к металлу (какая-то
часть бывшего принтера или CD-ROM), вырезал деталь. Осталось просверлить
отверстия и согнуть в нужных местах.
Найдя несколько маленьких шурупчиков и
насверлив отверстия в пластмассе (диаметр в 2 раза меньше, чем у шурупов),
я присоединил крепление для аккумуляторов. Можно согнуть боковые ламели таким
образом, что блок аккумуляторов будет входить плотно и не будет выпадать,
даже если перевернуть робота "вверх ногами".
Все это вы можете наблюдать на фотографиях, которые для удобства даны разного
размера.
 640
(38kb) 1600 (150kb) 640
(38kb) 1600 (150kb)
 640
(36kb) 1600 (146
kb) 640
(36kb) 1600 (146
kb)
 640
(39kb) 1600 (171kb) 640
(39kb) 1600 (171kb)
|  Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
 640
(38kb)
640
(38kb)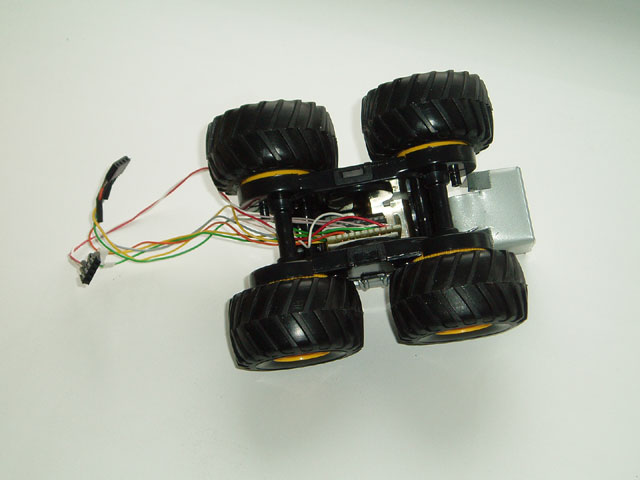 640
(36kb)
640
(36kb)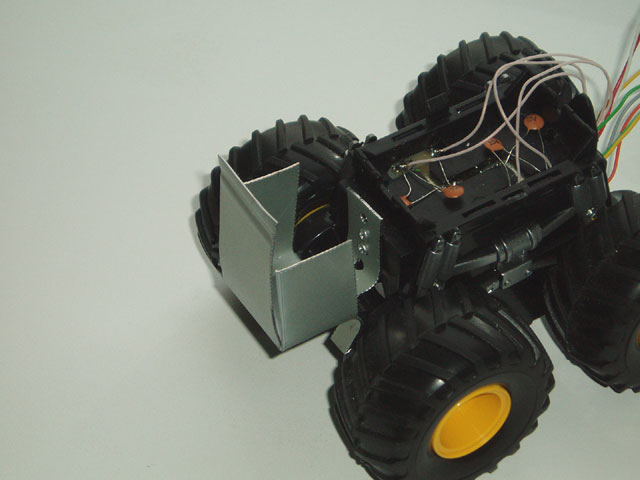 640
(39kb)
640
(39kb)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}