Сумо - одно из самых увлекательных соревнований роботов Лего Ev3.
В данном соревновании робот должен вытолкнуть робота противника за круг при этом самому
не выехать за границу круга.
В самом начале соревнования роботы ставятся в центр круга,
после страта программы запускаются и роботы должны подождать 3 секунды,
после этого роботы должны доехать до границы круга и только потом они имеют
возможность атаковать противника.
Опишем алгоритм и программу Сумо для робота EV3
1 Действие.
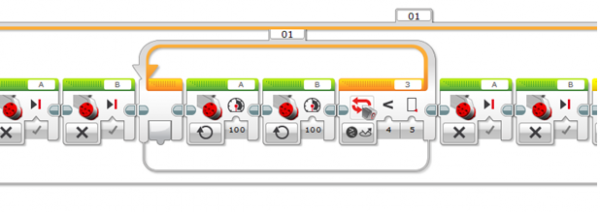
Робот ждёт 3 секунды, отъезжаем от центра круга до границы, едем вперёд, крутимся,
ищем врага, едем до врага, если едем от границы то отъезжаем назад.
Ставим ожидание на 3 секунды.

2 Действие. Отъезжаем назад, до границы.
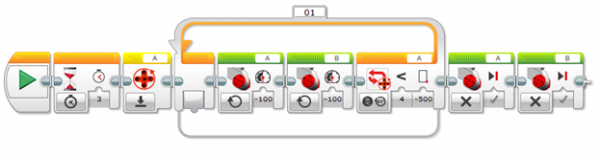
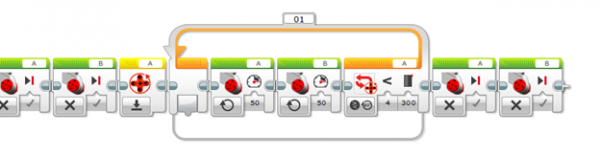
3 действие. После того как робот отъехал до границы он должен выдвинуться вперед. Движение вперёд.
4 Действие. Ставим бесконечный цикл. Робот будет атаковать врага, пока его не вытолкнет или пока не закончится время соревнования.
в него ставим цикл вращение c ультразвуковым датчиком. (можно использовать и инфракрасный датчик)
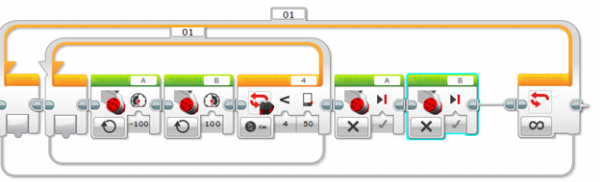
5 Действие. Едем вперёд до тех пор, пока датчик цвета не увидит чёрную линию, границу круга.
6 . Действие После того как увидели границу мы отъезжаем назад.
Задание.
Напишите отъезд назад сами, используя урок 1.Движение и повороты EV3
Другие схемы роботов lego ev3
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте