Подробная инструкция по сборке простейшего шарикопульта из компонентов конструктора миндсторм нхт 2.0 версии 8457 с готовой тестовой программой. Смотрите, собирайте, тестируйте, программируйте свои действия.
Интересует работа в Полати? Перейдите на rusprofile.ru и изучите подробности
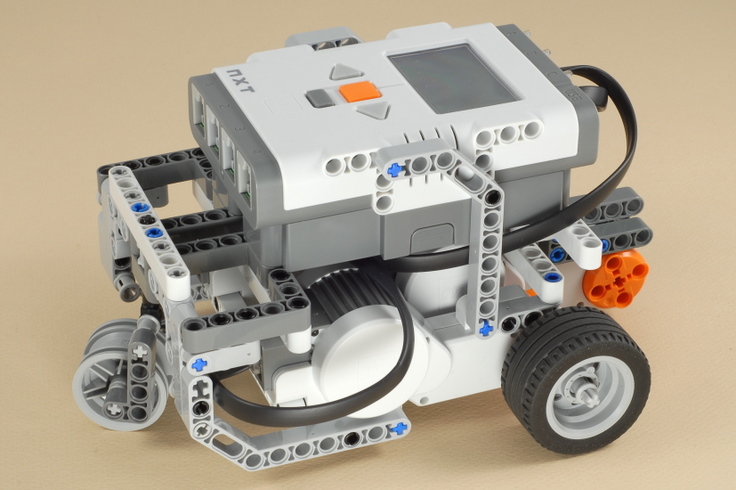
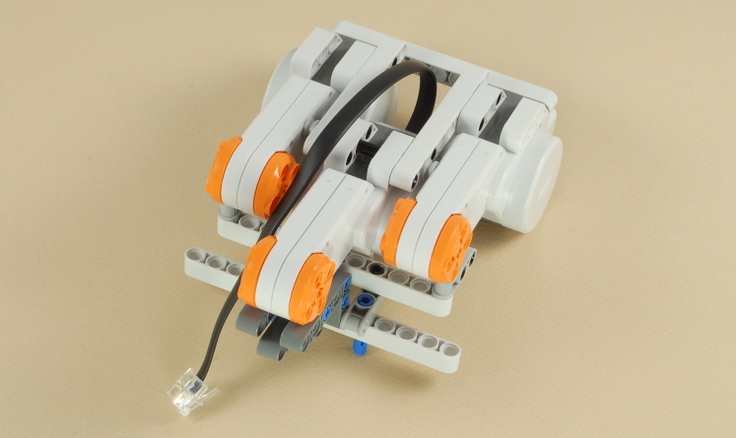
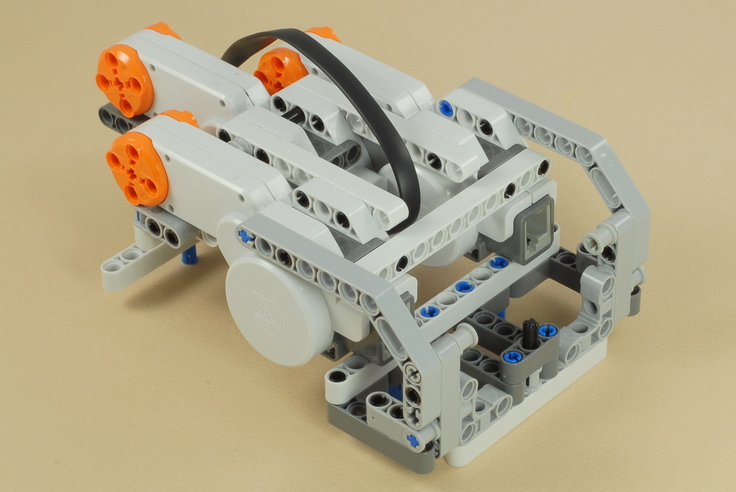
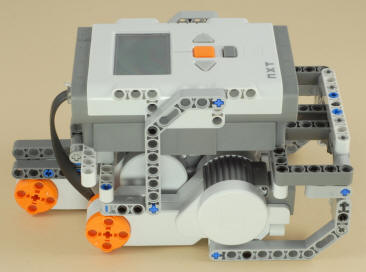
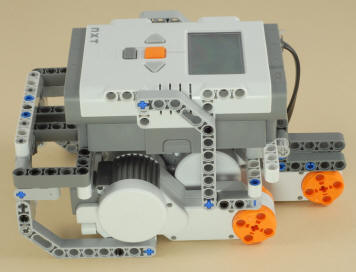
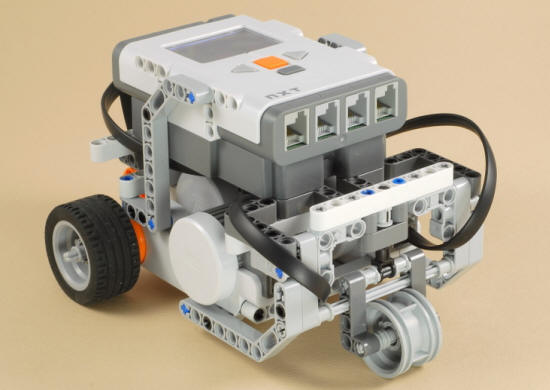
Робот с тремя двигателями
Версия лего миндсормс nxt 2.0 (версия 8647)
Сложность строительства ,
программирования:
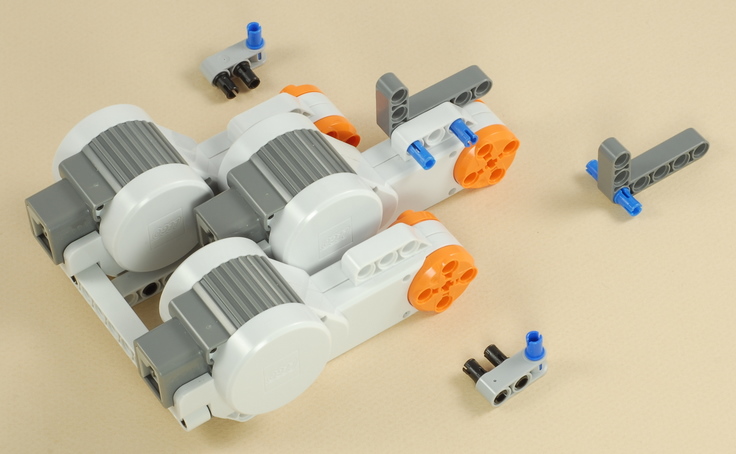
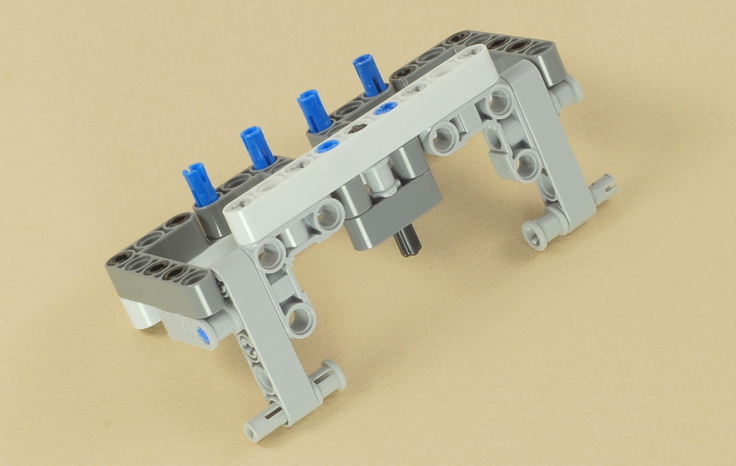
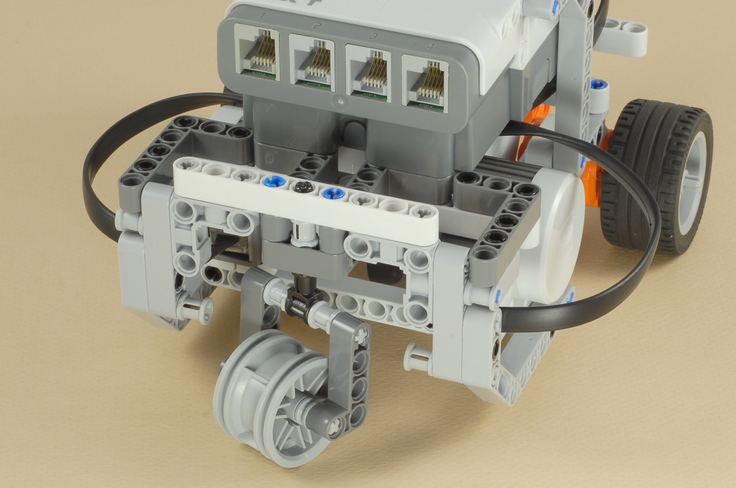
Эта базовый робот (платформа) использует два двигателя и поворотные колесо,
чтобы легко перемещаться на любой поверхности. Будь то ковер или линолеум/ламинат.
Третий мотор установлен низко в центре с некоторыми точками крепления
для дополнительных механизмов, которые вы можете прикрепить к нему.
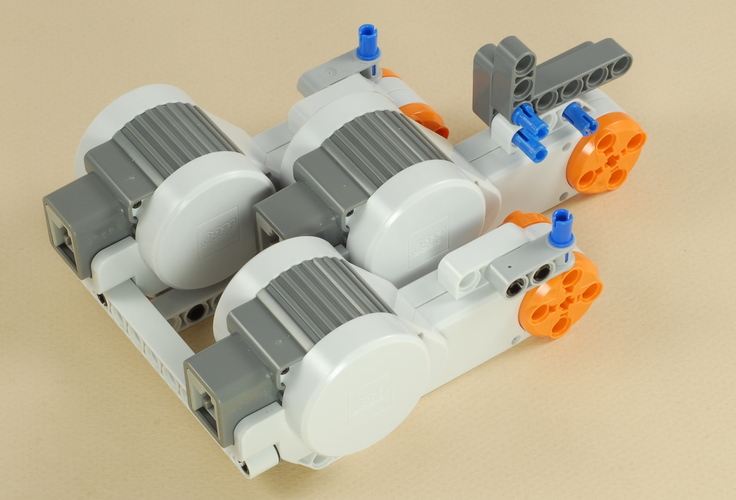
Это платформа надёжная, конструкция тщательно продумана и Вы можете
использованы её в качестве базы для других проектов.
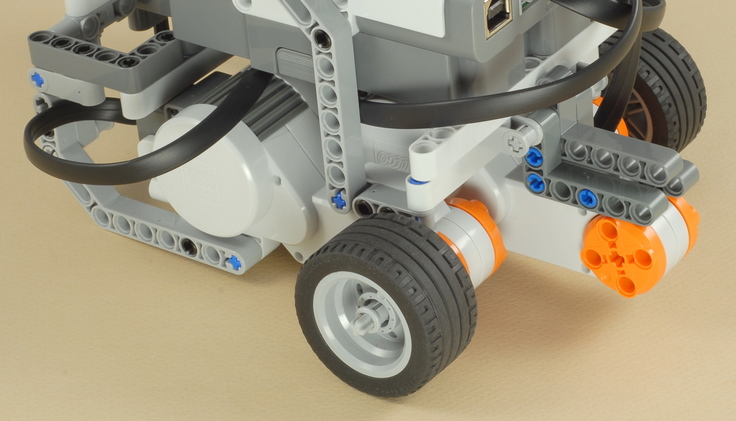
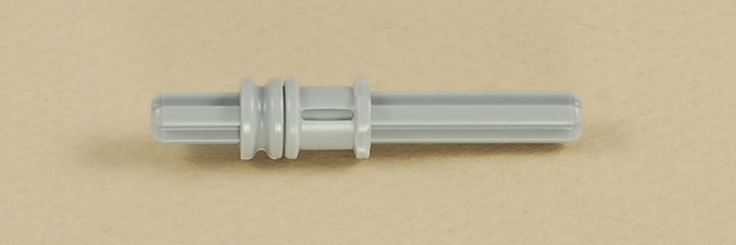
К конструкции робота имеется возможность вставить ось для предотвращения поворота
третьего колеса. В случае установки оси робот будет ехать прямо.
Поворот при этом будет осуществляться двигателями.
Вы можете экспериментировать с роботом как со свободно вращающимся 3-м колесом,
так и заблокировав его движение.
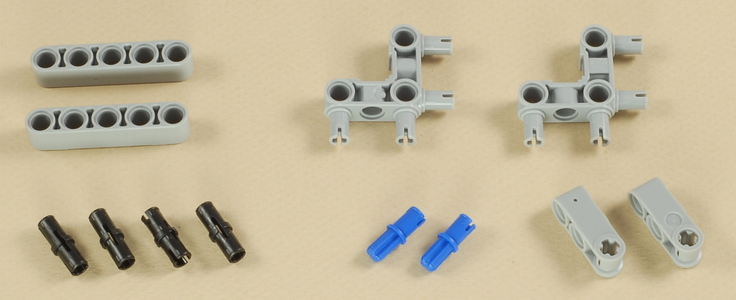
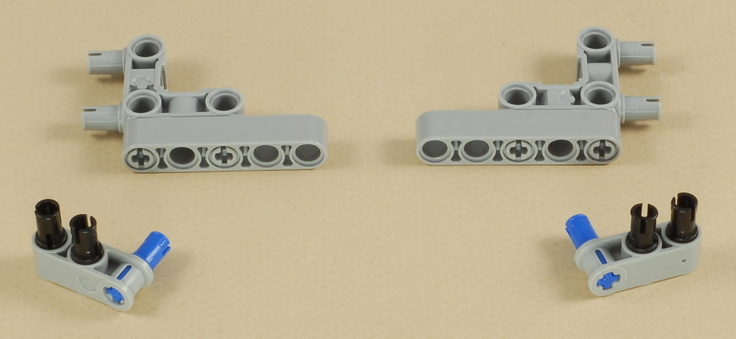
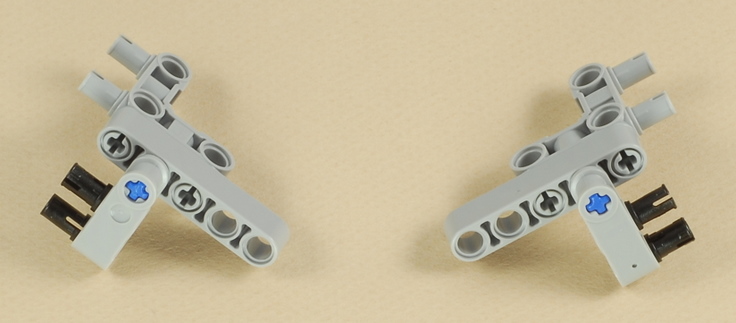
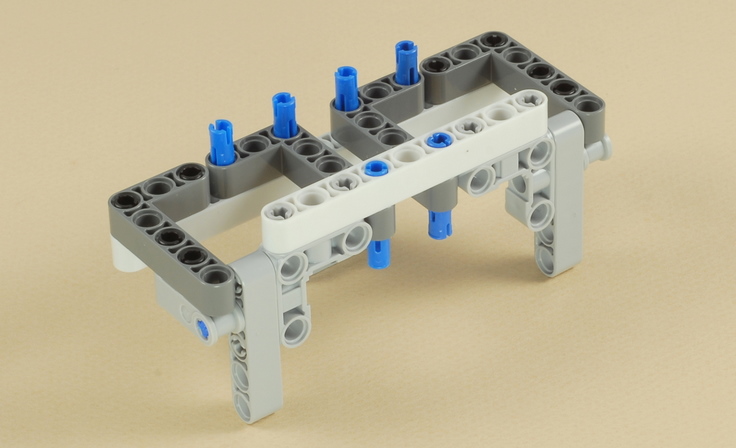
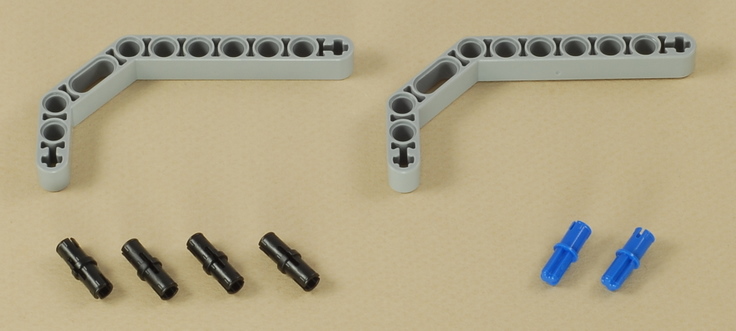
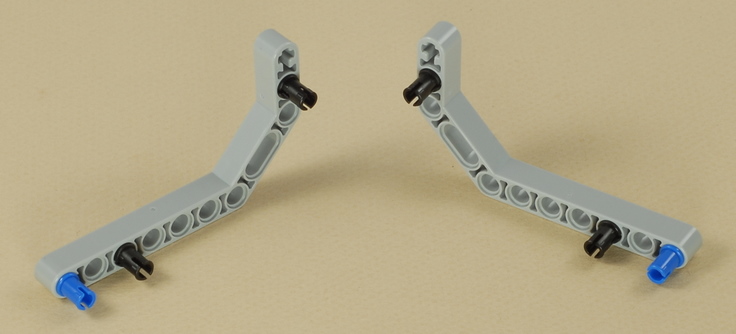
Инструкция по сборке
1
2
3
4
5
6
7
8
9
ИЛИ
Вы можете использовать NXT либо с батарейками типа АА или со специализированной аккумуляторной батареей NXT.
10
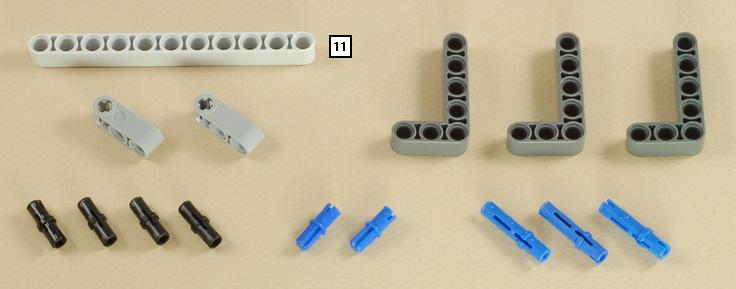
11
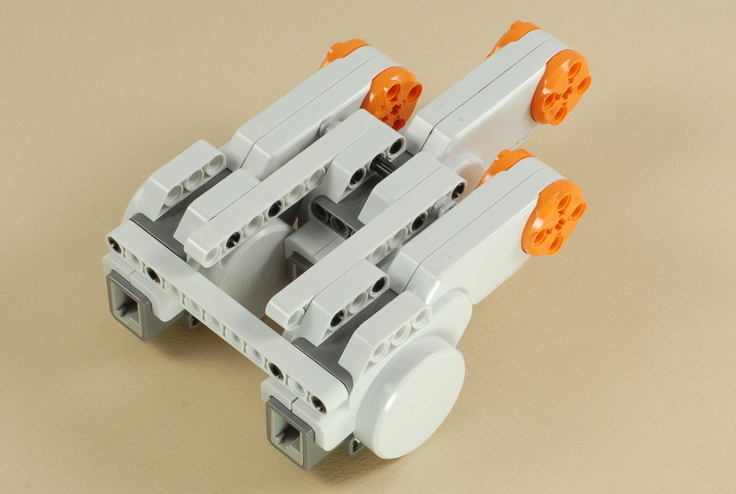
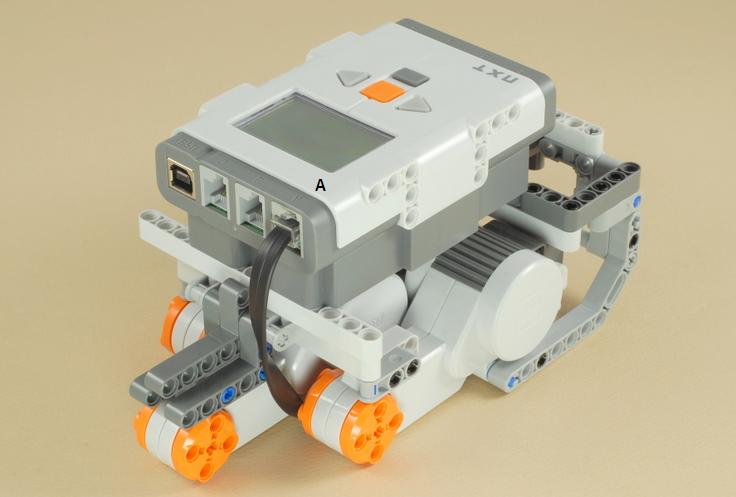
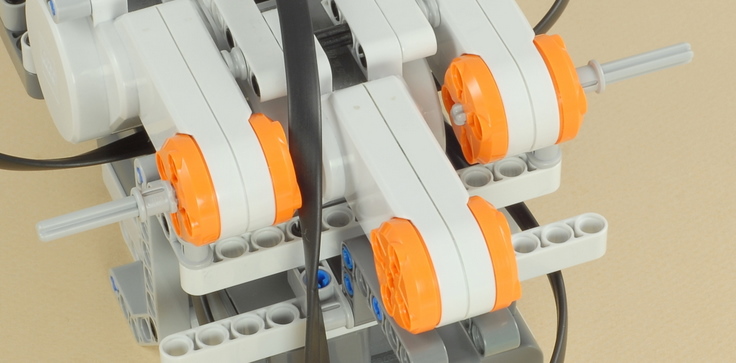
Используйте два средних провода (по 35 см каждый) для подключения двух серводвигателей к
портам В и С контроллера NXT.
Провода прокладываем крест на крест под блоком NXT, чтобы провода не мешали.
Соедините провода так, чтобы порт B соединен с двигателем на стороне B,
и порт С был соединен с двигателем на стороне C. Вытяните провод подальше от двигателя - ближе к центру.
12
13
14
Программируем робота
Этот базовый робот прост в настройке и использовании и может быть
использован в качестве базы для других проектов.
Третий двигатель на низком уровне в передней (или задней части) робота
может быть использован для крепления дополнительных механизмов.
Обратите внимание, что Вы можете управлять роботом в любом направлении.
Для начала об основных вождения, вот несколько программ, которые демонстрируют
использование Перемещение блока делать различные виды поворотов.
Первая показывает три вида
движения с помощью "БЛОКА ДВИЖЕНИЕ":
Поворот двумя двигателями, где колеса поворачиваются в противоположные стороны,
чтобы робот быстро повернул направо.
поворот одного колеса, где робот поворачивается путем движения одного колеса и
остановкой других. Этот вид поворота занимает больше места, чем предыдущий
вариант, но получается, но, как правило, более точно.
Кривой поворот, где робот делает постепенный поворот путем перемещения
одного колеса быстрее, чем другого.
Вторая
более сложная и демонстрирует использование параметра "Руководящий" блока движения.
Блок перемещения управляет количеством поворотов. Это заставляет робота
ехать по спирали, регулируя ридиус поворота.
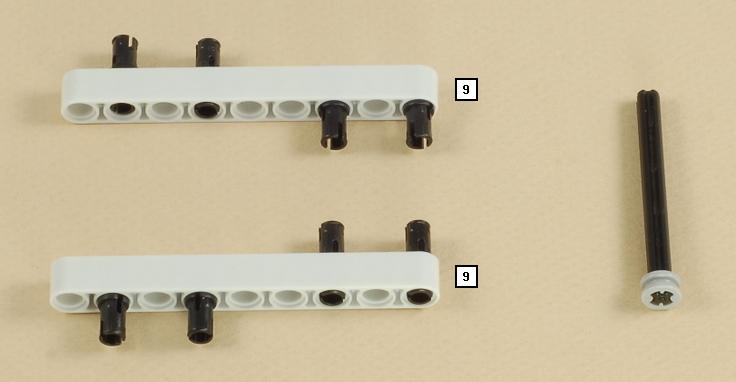
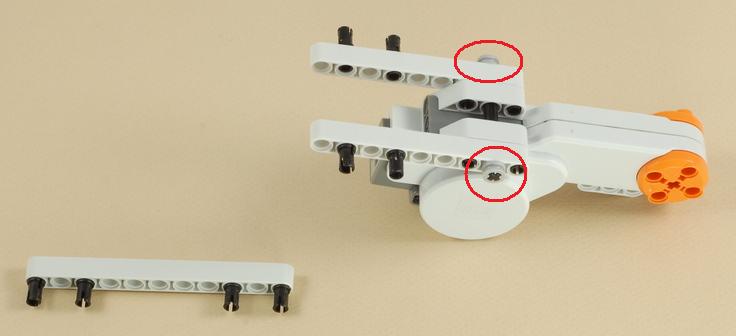
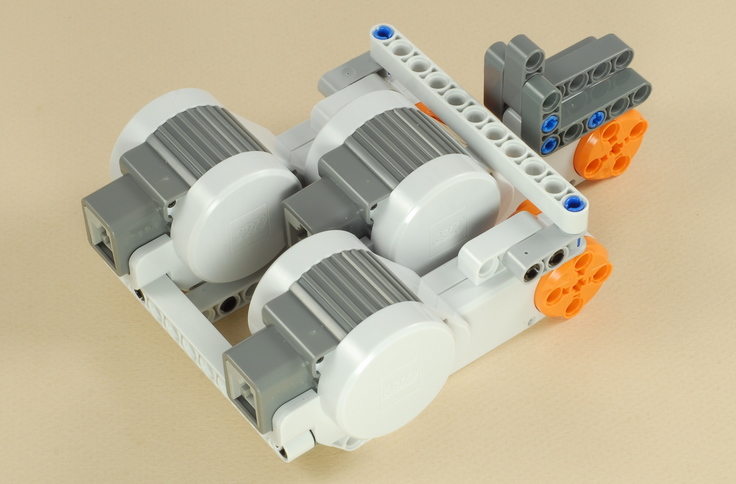
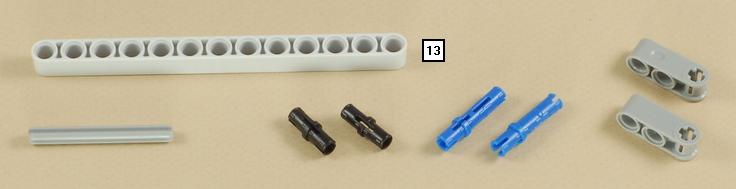
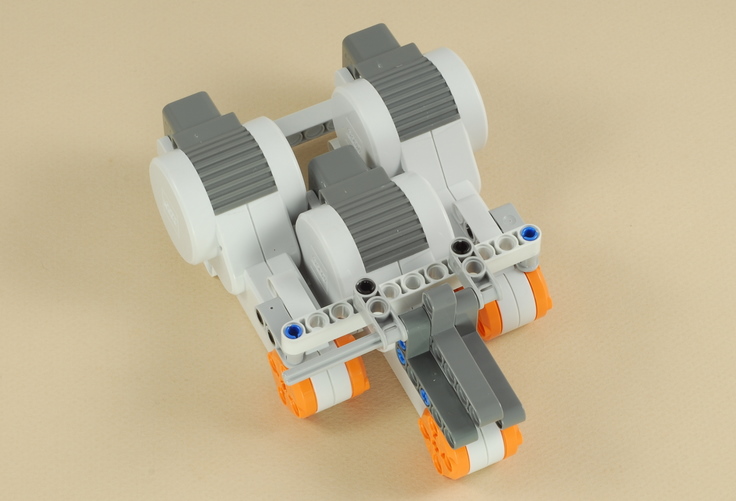
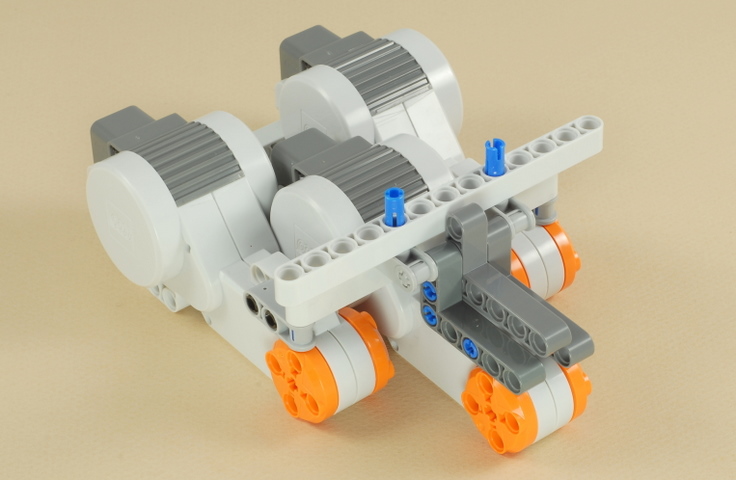
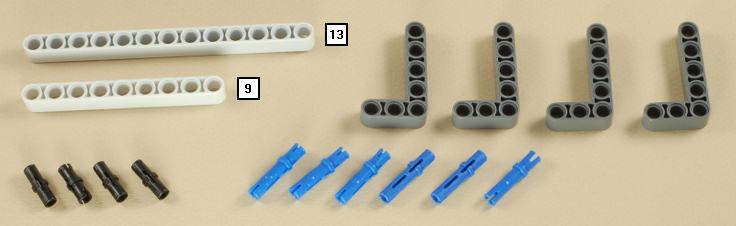
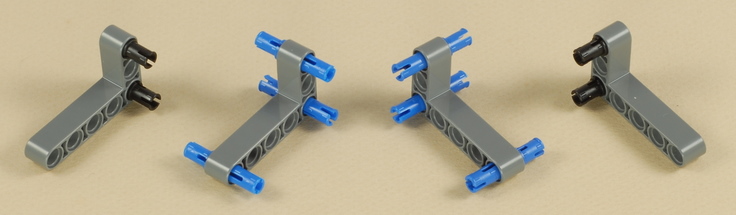
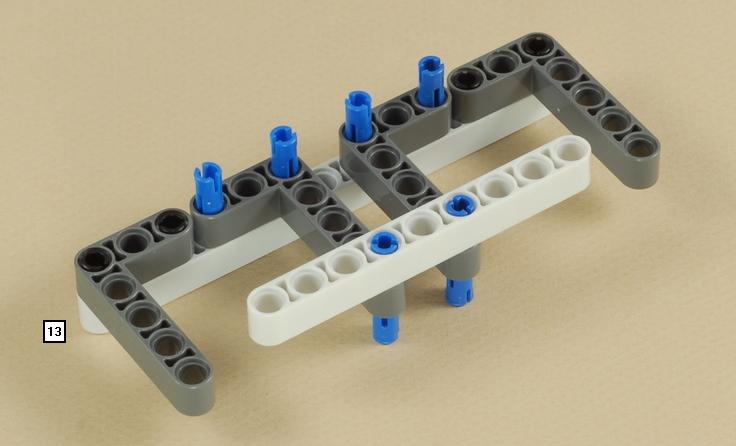
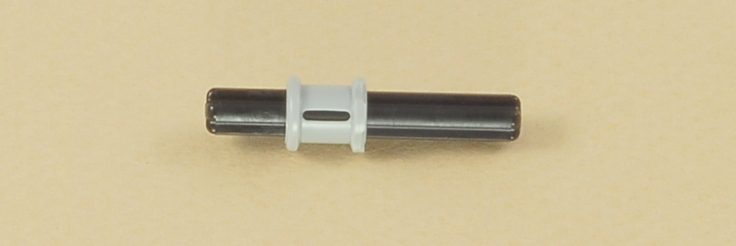
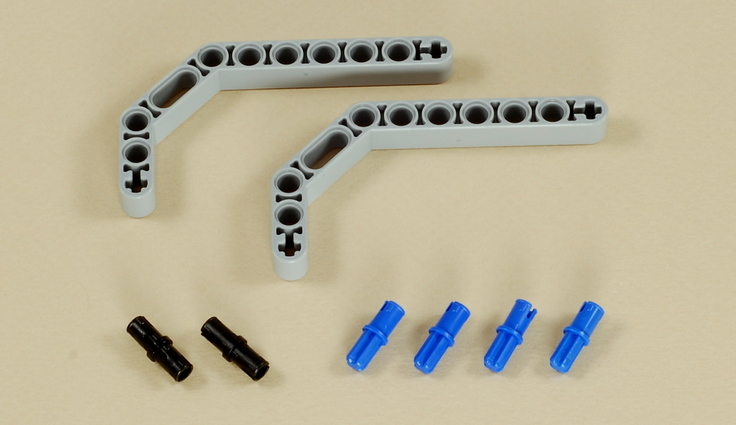
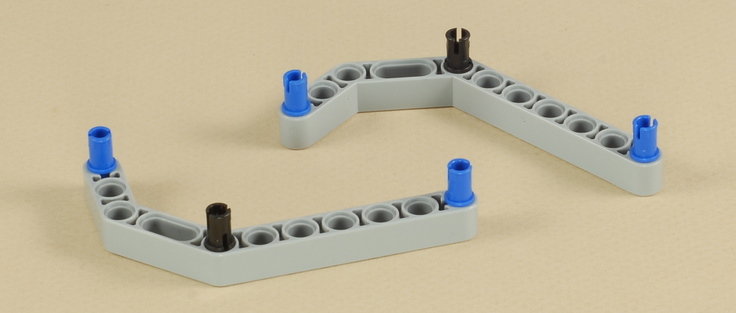
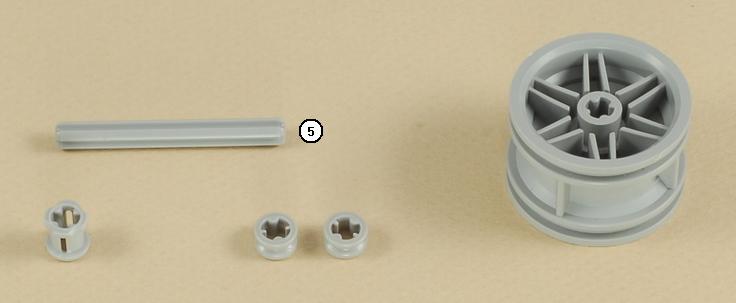
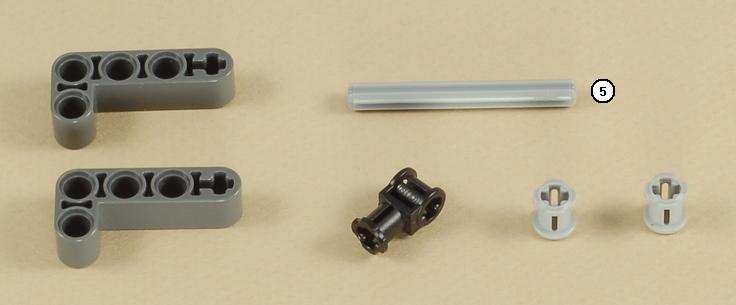
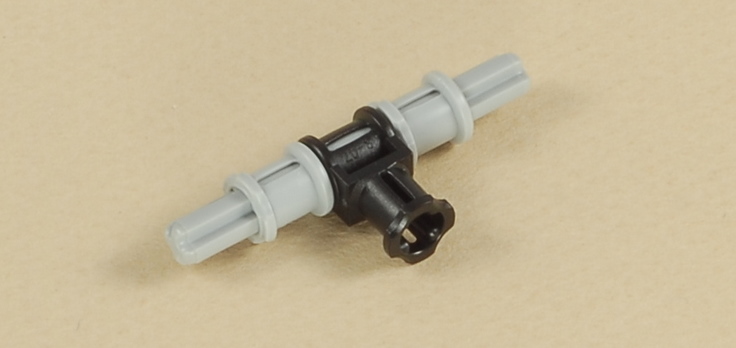
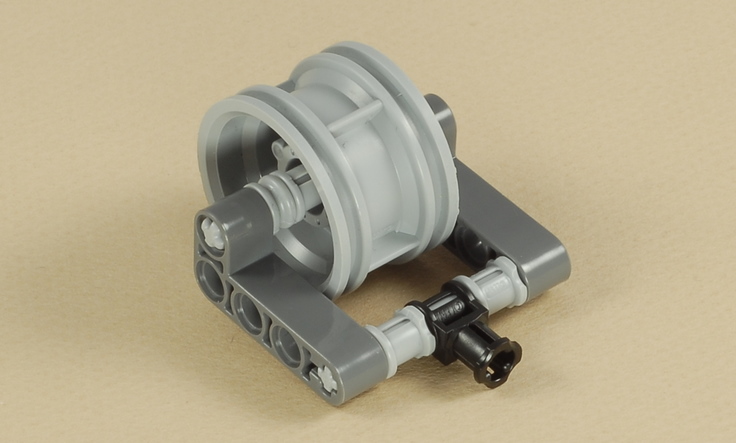
Альтернативный дизайн с фиксированной третье колесо
Один из вариантов конструкции - добавление блокировочного моста,
который предотвращает поворот третьего колеса.
Даннай вариант конструкции хорош для полов с гладким покрытием: линолеум, паркет, ламинат.
Но не подходит для ковровых покрытий. Для них не рекомендуется использовать блокирующий мост.
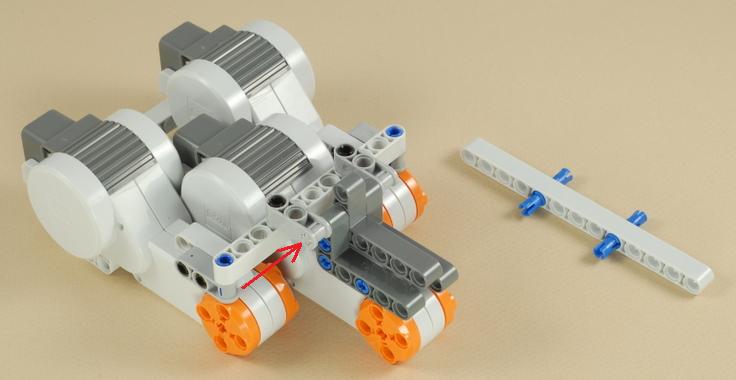
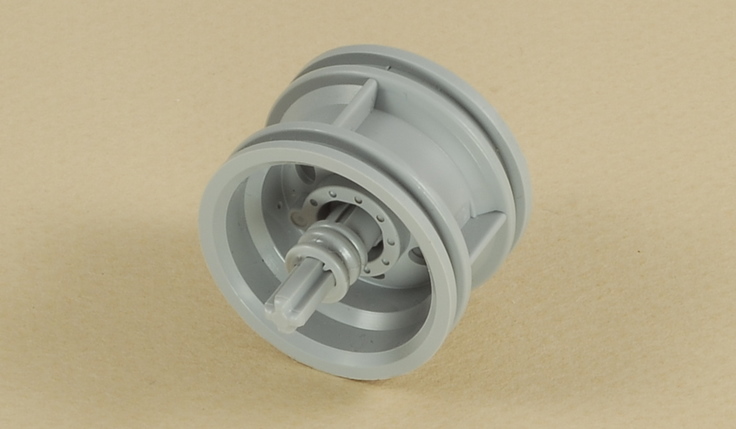
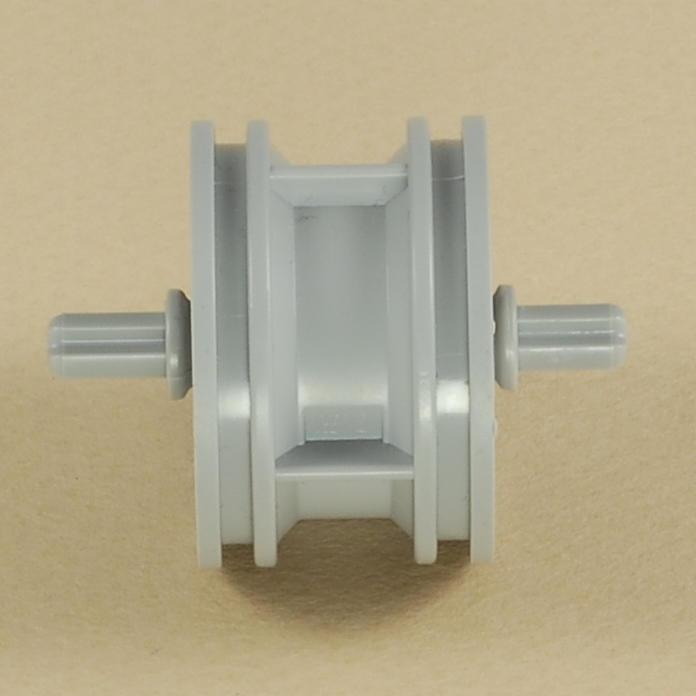
Частично разобрать одну сторону колеса для того, чтобы
вставить 9-ячеистый мост через колесо в положение, показанное ниже, а затем
собрать его.
Возможные эксперименты
Попробуйте написать такую программу, чтобы робот двигался вперёд и поворачивал.
Можете ли вы создать программу так, чтобы робот следовал по заранее
определенному путь прямо и частично поворачивал в определённых местах.
Используйте «блок Движение" с двигателями установлен в В и С.
Экспериментируйте с двумя различными вариациями третьего колеса:
без моста с возможностью поворачивать в любом направлении и и блокированным для поворотов
колеса на различных поверхностях пола. Какое покрытие оказывается хуже для выполнения задачи,
а на какой робот поворачивает и ведёт себя точнее?
Попробуйте добавить дополнительный механизм к третьему двигателю, или
просто прикрепите своё дополнение к роботу.
Попробуйте добавить какие-либо датчики к роботу. Например, можно добавить
датчик касания. И запрограммировать робота так, чтобы при нажатии кнопки он останавливался.
Или добавить ультразвуковой датчик, и запрограммировать робота так, тобы тот остановился
перед стеной (при наличии препятствия перед ним).
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте