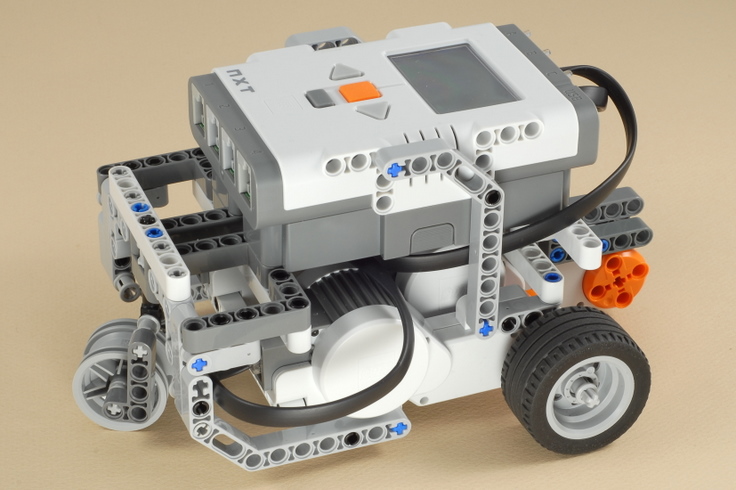
Подробная инструкция по сборке прикольного робота под названием 'Нападающий коготь' из компонентов конструктора миндсторм нхт 2.0 версии 8457 с готовой тестовой программой. Смотрите, собирайте, тестируйте, программируйте свои действия.
Версия лего миндсормс nxt 2.0 (версия 8647)
Сложность строительства ,
программирования:
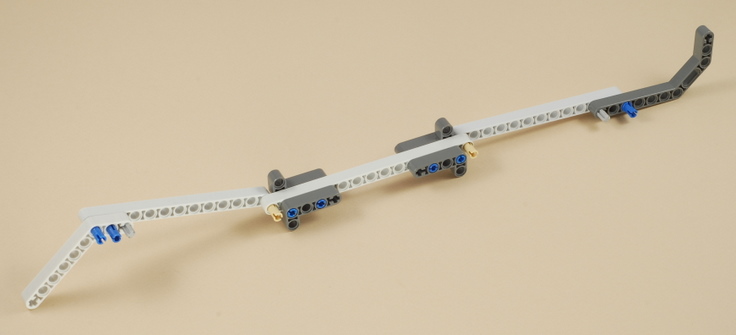
Этот нападающий коготь будет использовать ультразвуковой датчик для
автоматического обнаружения цели, корректировать расстояние до цели, затем
ударяет когтём, как хлыстом, чтобы попасть в цель.
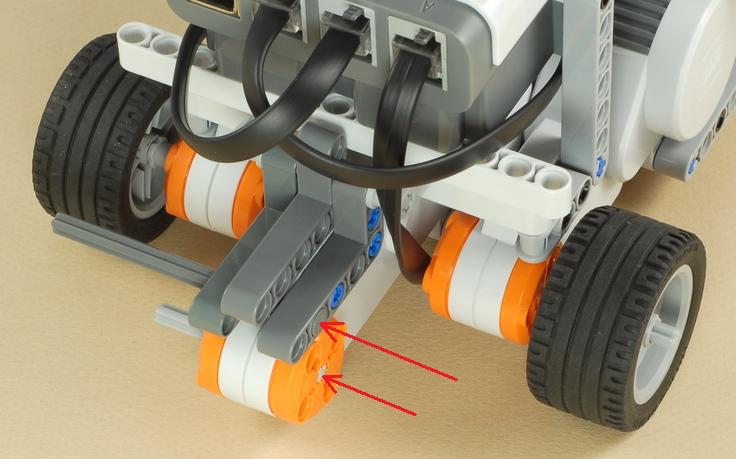
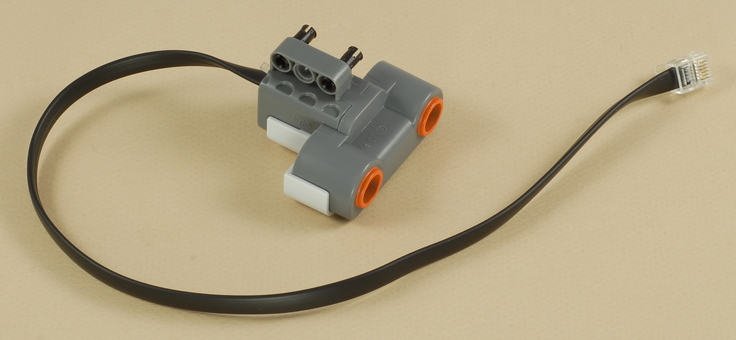
Подключите провода для ультразвукового датчика в порт 4 на блоке NXT.
Маршрут прокладки кабеля должен пролегать через шасси как показано на рисунке, чтобы кабель не мешал движению.
17
Программируем нападающего когтя
позволяет роботу автоматически находить
цель, а затем ударять по ней.
1. Поместите "Нападающий коготь" к цели достаточно близко для того, чтобы робот мог её увидеть.
Желательно все опыты проводить на жёсткой поверхности, такой как линолеум, ковролин, паркет.
Не рекомендуем использовать робота на ковре с густым воросом.
Цель должна быть на расстоянии не более 60 см от робота.
2. Запустите программу clawstrike, отойдите от робота на шаг, чтобы робот не увидел
Вас. В начале программа издаёт три предупреждающих сигнала, чтобы дать вам время отойти на достаточное расстояние.
3. Нападающий ноготь постарается найти и попасть в цель следующим образом:
А. Медленно поворачиваясь вокруг своей оси, стержень ищет мишени ультразвуковым датчиком;
Б. Когда цель захвачена и находится в пределах досягаемости, робот подаёт звуковой сигнал;
В. В противном случае, робот снова начинает поворачиваться пока не захватит цель. При этом робот будет подавать другой звуковой сигнал;
Г. Робот может отъехать назад, чтобы попытаться попасть прямо в центр мишени;
Д. Ультразвуковой датчик измеряет расстояние до цели, затем двигается вперед
или назад, чтобы настроить диапазон до 33 см;
Е. Робот ударяет коготём как кнутом.
Возможные эксперименты
* Процесс поиска цели и подруливания текущей программы имеет низкую точность.
Попробуйте несколько разных стартовых позиций, чтобы найти те, которые хорошо работают.
Кроме того, некоторые объекты ультразвуковой датчик обнаруживает лучше, чем другие.
Попробуйте поэкспериментировать с различными целями.
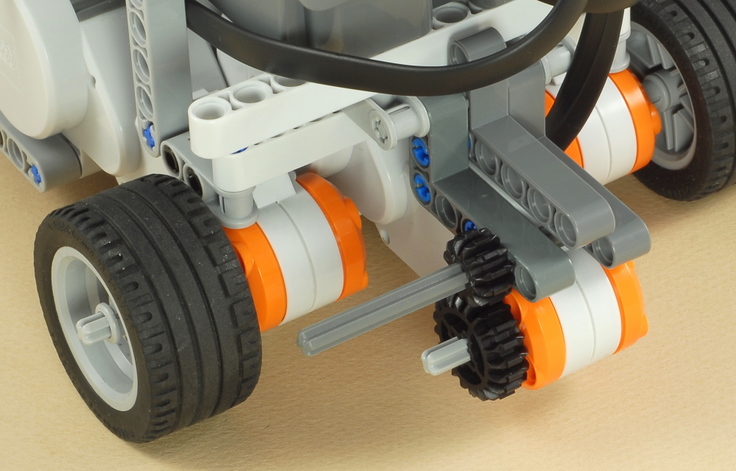
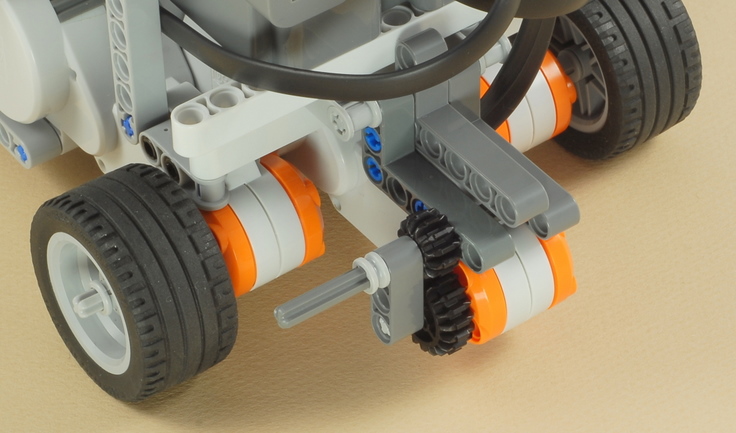
* Хотя 3-х колёсный бот, используемый в этой конструкции имеет поворотный
ролик-колесо в задней части, что позволяет ему передвигаться и на ковре, но
это же самое колесо представляет некоторые неточности в поворотах и имеет ошибки позиционирования.
Попробуйте блокировки заднее касторовое колесо, установив блокирующий мост, как показано в конце
инструкции. Это позволит быть роботу более точным на гладком полу.
* Программа является примером работы «автономного робота» (не имеет дистанционного управления).
Вы можете попробовать запрограммировать "робота нападающий коготь" так, чтобы он реагировал
на пульт дистанционного управления, используя идеи, сходные с автомобилем-молотом.
Вам нужно будет немного изменить программу.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте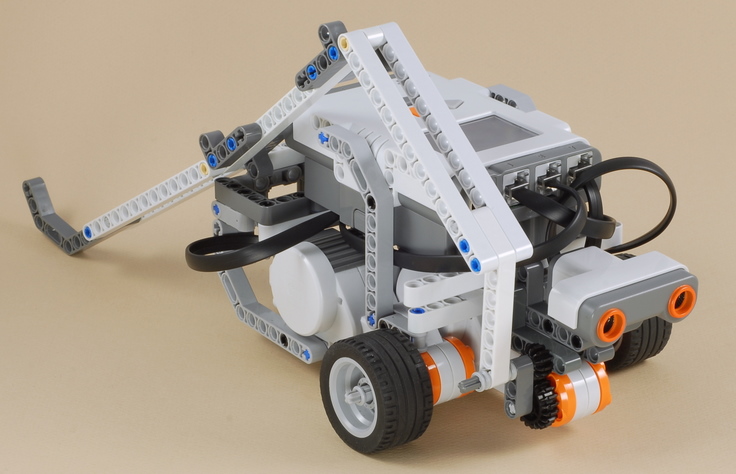 Этот нападающий коготь будет использовать ультразвуковой датчик для
автоматического обнаружения цели, корректировать расстояние до цели, затем
ударяет когтём, как хлыстом, чтобы попасть в цель.
Этот нападающий коготь будет использовать ультразвуковой датчик для
автоматического обнаружения цели, корректировать расстояние до цели, затем
ударяет когтём, как хлыстом, чтобы попасть в цель.