Версия лего миндсормс nxt 2.0 (версия 8647)
Сложность строительства ,
программирования:
Этот проект даёт вам возможность легко измерить растояние любого участка пути.
Для создания измерителя нам понадобится любой робот, который может двигаться
по заданной траектории с помощью простого проводного пульта дистанционного
управления. Результат измерения Вы можете увидеть на экране блока NXT и использовать
полученные измерения для настройки перемещения сервоприводов и блоков перемещения в своих программах.
Две различных программы доступны в нашей статье. В первой программе вы можете выбрать
одно из трех направлений движения для каждого сегмента контура с помощью трех
кнопок на NXT: прямо вперед, или поворот одним колесом налево и направо. В
более сложной второй программе вы можете выбрать одно из восьми
различных движений в том числе поворот робота и при поворотах колес в противоположных направлениях,
обратный поворот, и обратное движение.
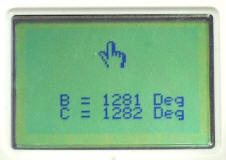
Измеряем в градусах прямое движение
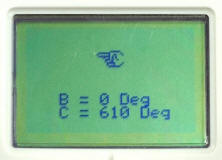
Измеряем левый поворот
Программа позволяет чередовать 8 различных движений, которые будут отобраны, в том числе сводных оборотов.
Инструкция по сборке
1-6
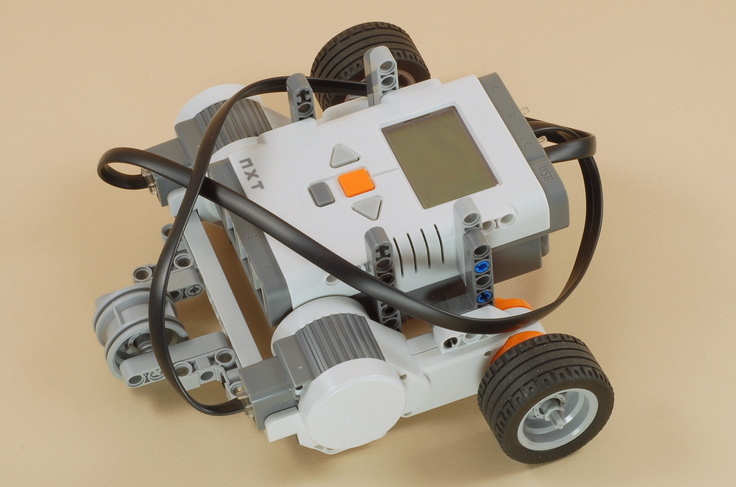
Начните с создания робота-автомобиля с двумя сервоприводами, например, "Робот пятиминутка".
(Нажмите на картинку для перехода к пошаговой инструкции).
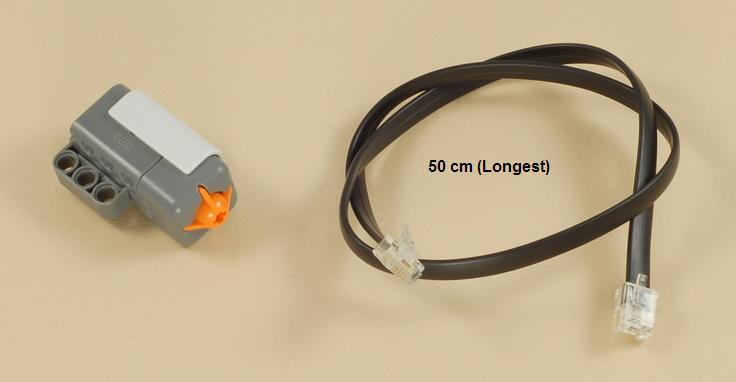
7
Подключите провод от датчика к порту № 1 на контролере NXT.
Программирование измерителя
Есть две различные программы. Эти программы могут
быть использованы на любом роботе с двумя стандартными приводами (один двигатель
приводит левое колесо и один двигатель приводит правое колесо). По желанию, Вы можете
изменить программы для учета других подключений двигателей
(вперед вместо назад) или вообще перпрограмиировать двигатель на другой порт NXT
(когда двигатель подключен на левую сторону). См. ниже инструкции.
предоставляет простой способ для измерения отрезков пути с
тремя типами движения: прямо вперед, и полворот одним колесом налево и направо. См. ниже инструкции.
более сложная и имеет восемь
типов движения, в том числе трех типов поворотов в каждую сторону, и прямо вперед и движение назад. См. ниже инструкции.
Использование PathMeasure программе
позволяет выбрать один из трех направлений для каждого из
сегментов на своем пути: прямо вперед, поворот налево одним колесом и направо.
Если вы хотите измерить различные виды поворотов, таких как поворот на месте,
где колеса поворачиваются в противоположных направлениях, Вам необходимо использовать
Программу можно
использовать следующим образом:
1.
В начале каждого сегмента, выберите направление использования кнопок блока NXT:
Стрелка влево: Левый поворот
Оранжевая центральная кнопка: прямо вперед
Стрелка вправо: поворот направо
Датчики поворота для В и С двигателей будут сброшены до нуля.
2.
Нажмите и удерживайте датчик нажатия на пульте дистанционного управления,
чтобы заставить робота двигаться в указанном направлении. Вы можете нажать датчик
не один раз, и вы также можете настроить колесо позиции вручную в конце
сегмента, если это необходимо. Количество пройденных градусов каждого двигателя отображаются
на экране.
3.
Для начала нового движения, нажмите кнопку на блоке NXT для нужного направления направления.
Изменение простой программы в соответствии с вашими робот
В простой программе предполагается, что двигатели должны быть
запущены в направлении «вперед», чтобы заставить робота двигаться вперед, и что
двигатель Б слева от робота и двигателя C находится на правом боку. Если ваш робот
собран при других условиях то, вам необходимо изменить программу.
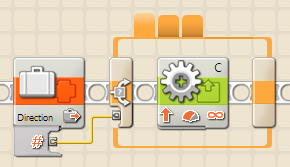
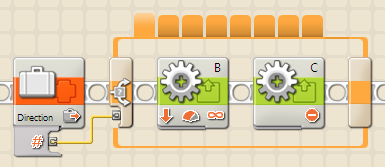
Чтобы изменить программу, найти 3ий коммутатор с вкладками в нижней
последовательность программы, как указано на рисунке справа. Нажмите на три вкладки,
чтобы показать двигателя и перемещение блоков, используемых для трех направлений
движения (налево, прямо, направо) и меняйте их по мере необходимости.
Использование "продвинутой программы"
более сложная альтернатива первой программы.
Она уже позволяет выбрать один из восьми направлений для каждого из сегментов на вашем пути.
Программа использует следующее управление:
Кнопку со стрелкой влево:
Выберите предыдущий тип движения
Кнопку со стрелкой вправо:
Выберите Далее Текст движения
Центральная оранжевая кнопка:
Сброс датчиков поворота на нуль
Нажмите и удерживайте тактильного датчика:
Движение в выбранном направлении
Как и в первой программе, вы можете нажать датчик нажатия более одного раза при необходимости
завершить движение. Также можете настроить колесо позиции вручную в конце движения, если это необходимо.
Используя клавиши со стрелками выберите тип движения будет вращаться
непрерывно через цикл из восьми различных направлений (начиная с 4 = прямо
вперед) следующим образом:
№ п/п
Движение
Двигатель B
Двигатель C
1
Левый реверсивный поворот
Назад
Стоп
2
Левая разворот
Назад
Вперед
3
Левый поворот одним колесом
Стоп
Вперёд
4
прямо вперед
вперед
вперед
5
Правый поворот одним колесом
вперед
Стоп
6
Правый разворот
Вперёд
Назад
7
Правый реверсивный поворот
Стоп
Назад
8
Прямой обратный ход
Назад
Назад
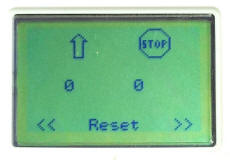
Две иконки на верхней части экрана указывают выбранный тип движения и в каком
направлении серводвигатели робота будут двигаться (вперед, назад, или стоять).
Вращение в градусах отображаются для левого и правого двигателей.
Изменение сложной программы в соответствии с вашим роботом
Программа написана так, что двигатели должны быть
запущены в направлении вперёд, чтобы заставить робота двигаться вперед, и что
двигатель Б слева от робота и двигателя C находится на правом боку робота.
Если в Вашем роботе двигатели подключены другим образом, то Вам нужно изменить программу.
Чтобы изменить программу, найди 8-ой коммутатор с вкладками в нижней
последовательность программы, как показано на рисунке справа. Нажмите на вкладки,
чтобы показать двигатели и блоки перемещения, которые используются для всех восьми
направлениях движения. Измените их по мере необходимости (см. таблицу движений выше).
Задачи для обучения
Используйте длиномер, чтобы наметить и измерить путь от начальной точки
до цели, в том числе два или три поворота на 180 градусов на этом пути. Затем
напишите свою собственную автономную (не с дистанционным управлением) программу, которая
будет заставлять робота двигаться по указанному пути.
Проверьте свои программы и настройки длительности, при необходимости, чтобы
увидеть, насколько точно вы можете добраться до цели.
Попробуйте использовать одну из имеющихся программ на различных
роботах, своей собственной конструкции. Если ваш робот не слушается программы
и делает всё наоборот, то измените программу в соответствии с конструкцией вашего робота
по рассмотренной ранее инструкции.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте