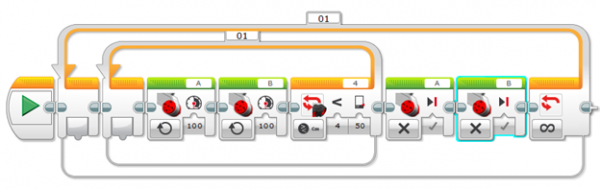
Действие 2. В цикле выбираем ультразвуковой датчик, расстояние в сантиметрах, указываем расстояние до препятствия.
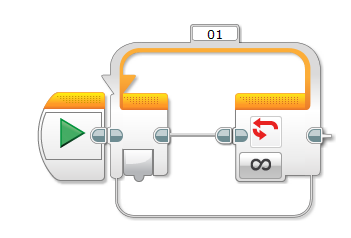
Действие 3. Вставляем бесконечный цикл движения назад.
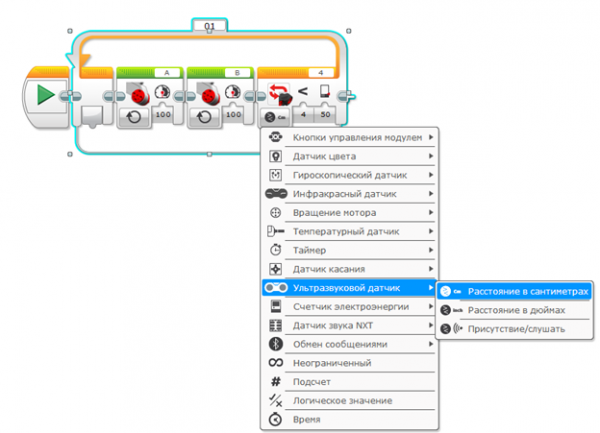
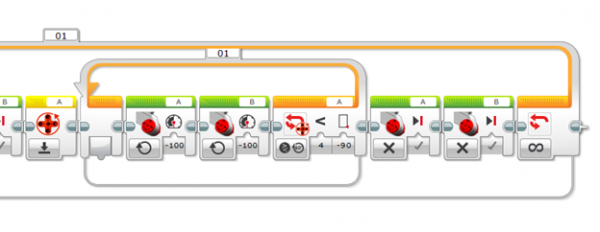
Действие 3. Установка порта ультразвукового датчика в цикле
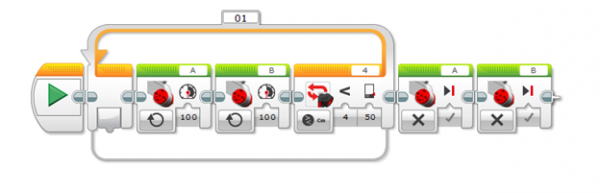
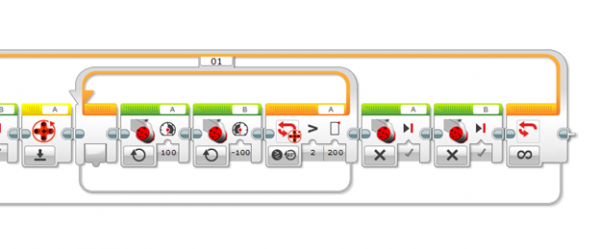
Действие 4. После цикла всегда идёт остановка моторов.
Задание
1 Написать программу движения по квадрату, с использованием цикла
2. Написать программу для робота разведчика. Робот едет до препятствия, останавливается, отъезжает немного назад, поворачивается на права, и едет до следующего препятствия, пока не найдёт выход.
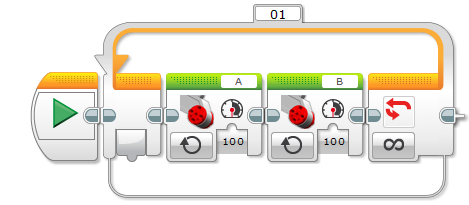
Ставим бесконечный цикл, действия будут выполняться бесконечно, пока не выключим робота, вся программа будет в этом цикле
Действие 2. В бесконечный цикл вставляем цикл движения до препятствия.
Действие 3. Вставляем цикл отъезда назад.
Действие 4. Вставляем цикл в поворот на право.
Другие схемы роботов lego ev3
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте