Видеодемонстрация алгоритма, позволяющего роботам заучивать движения рук человека » Новости робототехники
Совместные усилия Итальянского технологического института (Italian Institute of Technology) и Университета Токио позволили научить маленького робота Fujitsu HOAP-2 вытирать доску. За этим весьма оригинально реализованным проектом стоят те же люди, которые в прошлом году разработали алгоритм ARCHER, позволяющий роботам стрелять из лука.
Совместные усилия Итальянского технологического института (Italian Institute of
Technology) и Университета Токио позволили научить маленького робота Fujitsu
HOAP-2 вытирать доску. За этим весьма оригинально реализованным проектом стоят
те же люди, которые в прошлом году разработали алгоритм ARCHER, позволяющий
роботам стрелять из лука.
Роботехнический прогресс дошел до того уровня, когда машинам можно просто
показывать, что делать, а они будут это повторять – хотя бы на уровне простых
действий. Решение с доской реализовано как раз по такому принципу, названному
создателями «кинестетическим обучением».
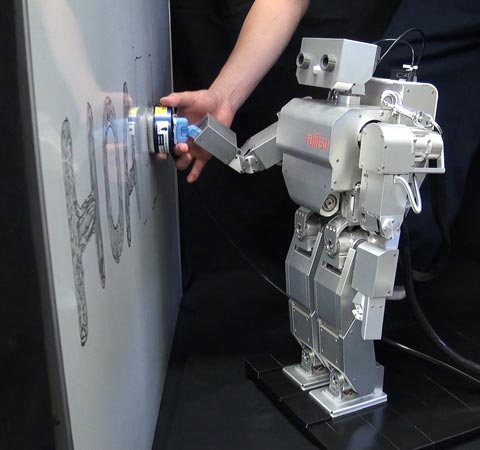
К манипулятору HOAP-2
присоединен ластик, который направляется человеческой рукой в нескольких
вариациях движений. Датчик крутящего момента фиксирует прилагаемые к
манипулятору силы, которые робот затем повторяет самостоятельно. Нижняя часть
тела управляется отдельным алгоритмом, позволяющим HOAP-2 удерживать равновесие
при движении манипулятора.
Хотя исследователи признают, что стереоскопические камеры не используются для того, чтобы
определять, где именно следует применить ластик, они отмечают, что эта функция
может быть добавлена в будущем. Пока же роботехники сконцентрировались на том,
чтобы испробовать такой способ обучения машины. Как видите, он показал себя
весьма эффективным и информативным вариантом, в перспективе позволяющим учить
роботов множеству различных задач.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте