22.06.2014, 16:36
Источник: 3dnews
Оригами, которое легло в основу концепции представленного на днях робота, представляет собой древнейший вид декоративно-прикладного искусства в Японии. Создание фигурок различной геометрической формы из бумаги уже рассматривалось специалистами как вполне перспективная базовая составляющая и для роботизированных устройств, о чём мы упоминали на страницах нашего издания. Озвученный экспертами из Массачусетского технологического института (MIT) подход предлагал применять для создания сложных деталей роботов специальные материалы, которые самостоятельно сворачивались и принимали бы нужную форму под воздействием температуры, создавая объёмные элементы из плоских исходных компонентов. Несмотря на то, что описанная методика не была использована при разработке оригами-колеса, о котором пойдёт речь в данной статье, именно японское искусство легло в основу идеи и подтолкнуло к созданию двух оригинальных роботизированных механизмов, спроектированных командами инженеров из Лаборатории биоробототехники сеульского национального университета и Гарвардской лаборатории микроробототехники.
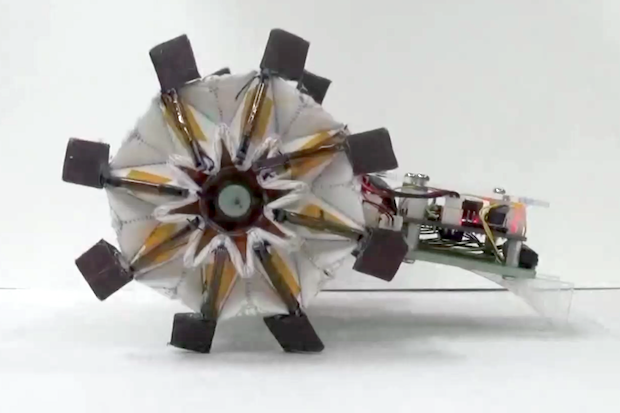
Продемонстрированная роботизированная версия устройства с соединёнными валом колёсами, похожими на так называемый «магический шар», конструкция и методика создания бумажного аналога которого известная практически всем поклонникам оригами, позволяет в зависимости от ситуации изменять их размеры.

Новинка, способная превратить колёса в массивные элементы для преодоления ступенек или же придать им практически плоскую форму, чтобы попасть в небольшие по габаритам проёмы, сумела привлечь к себе множество взглядов на крупнейшей робототехнической выставке IEEE International Conference on Robotics and Automation 2014 (ICRA).
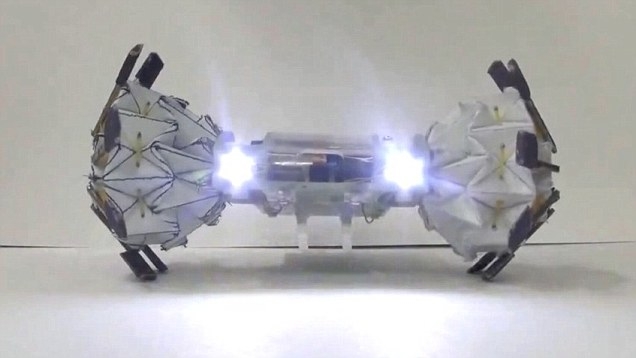
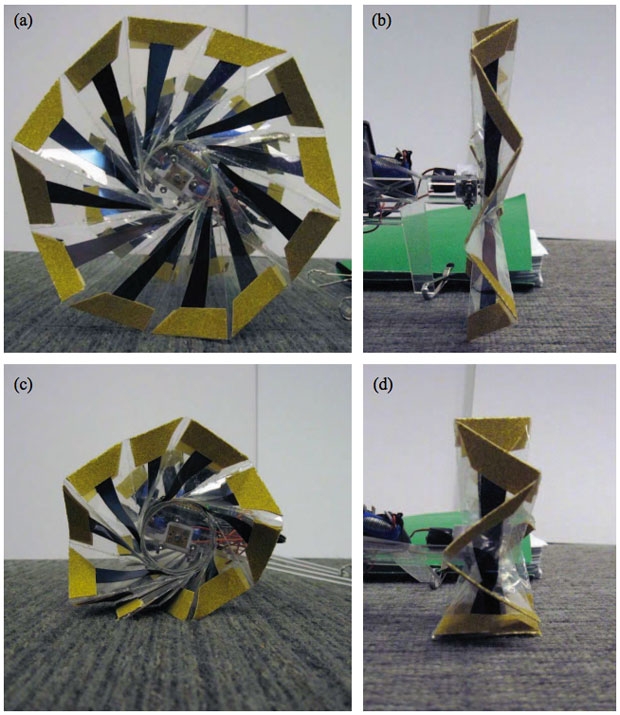
Её колёса с вмонтированными на внешней стороне датчиками для безошибочного ориентирования на местности способны умышленно поддаваться деформации при движении и изменять свой диаметр от 55 мм до 120 мм. Подобное технологическое решение осуществляется без вредоносного воздействия как на один единственный привод, отвечающий за масштабирование колёс, так и на остальную часть конструкции.
В рамках всё того же ICRA 2014 уже американскими учёными из Гарвардской лаборатории микроробототехники был продемонстрирован схожий по своей первоначальной концепции проект самостоятельно деформирующихся оригами-колёс, которые могут автоматически изменять свой размер в зависимости от текущей нагрузки. Подобный ход позволил бы роботу нового поколения, оснащённому таким уникальным шасси, самостоятельно подстраиваться и выбирать оптимальный вариант преодоления преград различного характера во время движения, а также выполнять роль тягача с возможностью масштабирования под определённую нагрузку.
Главным «козырем» детища специалистов из Гарварда как раз и является тот факт, что разработанная ими система выступает в роли бесступенчатой коробки передач, ведь изменения диаметров колёс приводит к уменьшению или увеличению такого параметра, как крутящий момент. На данном этапе развития робототехники понятия «трансмиссия» и «робот» кажутся не слишком совместимыми, так как крупногабаритные механизмы создаются достаточно громоздкими и неповоротливыми. Поэтому пока что они не нуждаются в данном, привычном для автомобиля, элементе конструкции. В будущем же ведущие специалисты данной отрасли рассматривают принцип функционирования оригами-колеса в качестве если и не основополагающего, то достаточно востребованного как для промышленных роботов будущего, так и для космических аппаратов вроде марсоходов.

Механизм передвижения обоих представленных роботов можно описать следующими словами: если на оригами-колёса действует слишком большая нагрузка, превышающая допустимый показатель и не позволяет им вращаться, то конструкция автоматически начинает процесс регулирования диаметра своих колёс. Подобного рода деформация, как её называют сами учёные, сопровождается повышением крутящего момента при уменьшении диаметра колеса и понижением значения крутящего момента при увеличении. Продолжается описанное регулирование колёс до тех пор, пока привод механизма не позволит преодолеть ему возникшее на пути препятствие или сдвинуть с места присоединённый к роботу груз. Колесо же, в свою очередь, эффективно адаптируется к изменяющемуся передаточному числу, актуальному для диапазона от его минимального и до максимального диаметра, предусмотренного конструкторами.
Чтобы не сильно углублять в теоретическую часть представленного технологического решения, достаточно будет посмотреть представленное американскими изобретателями видео, наглядно демонстрирующее способности и весь потенциал созданного механизма:
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
