22.06.2014, 14:00
Миниатюрный летающий робот Robo-fly получил «глаза»
Технологии идут по необратимому пути миниатюризации использующихся компонентов, что находит отражение не только в самых тонких/компактных смартфонах и планшетах, но и в робототехнике. Даже небольшие дроны по-прежнему остаются весьма заметными для человеческого глаза (не говоря уже про шум), поэтому учёными из Гарвардского университета было принято решение создать самый маленький в мире летающий робот, первый прототип которого они представили ещё в прошлом году. Им стала модель устройства под названием Robo-fly, которая была тщательно доработана с момента прошлогодней презентации и оснащена светочувствительными датчиками, вмонтированными в корпус из углеродного волокна. Масса беспилотного аппарата теперь составляет каких-то 106 мг. Правда, в сравнении с предыдущей моделью, которая весила лишь 80 мг, робот всё же слегка прибавил в своей массе.
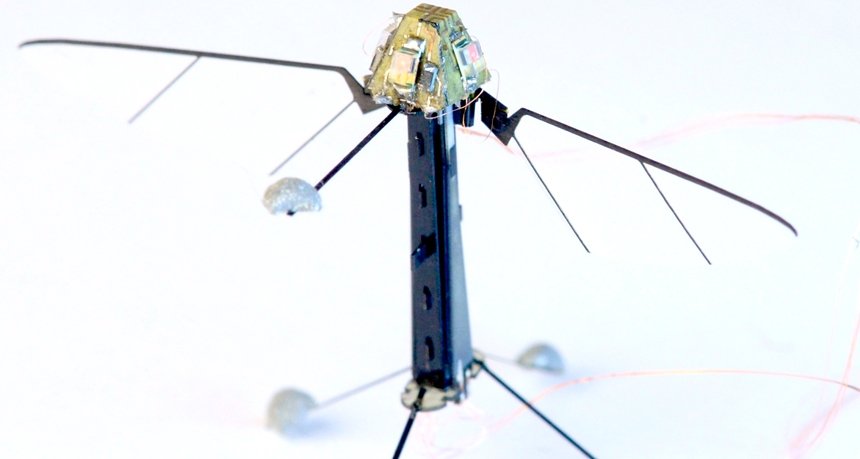 Крылья робота-мухи, напоминающего больше по внешнему виду комара, приводятся в движение при помощи электронных «мышц», представляющих собой материал, способный изменять свою форму под воздействием электрического тока. Подобное решение позволяет электронным мышцам, а если быть точнее — пьезоэлектрическим «мышцам» расширяться и сжиматься. Подобные колебания с частотой до 120 взмахов за минуту делают похожими движения искусственных крыльев на то, как трепещут своими крыльями мухи и пчёлы при полёте.
Однако описанное решение сложно назвать революционным, так как аналогичная схема применялась в том же роботе-водомерке, представленном в 2012 году. Он выделялся способностью передвигаться по водной поверхности, используя для скольжения свои нижние конечности, функционирование которых основывалось на работе пьезоэлектрических «мышц». Как и робот-муха, робот - водомерка обладал миниатюрными размерами и весил около 1 г.
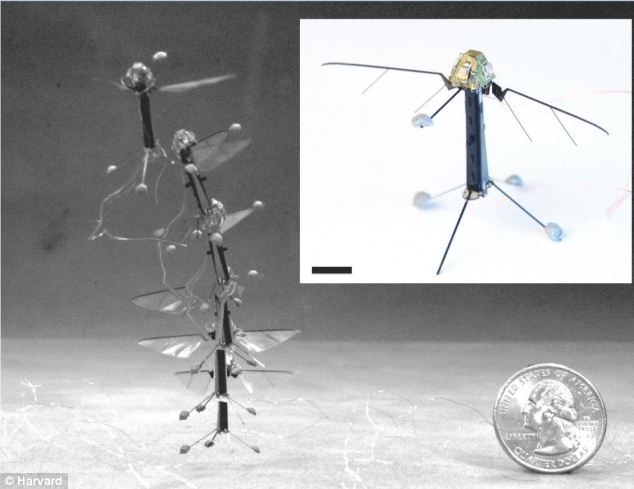
Конечно, даже теоретически встроить в мини-робот Robo-fly с массой чуть больше 1/10 г. аккумулятор вряд ли представляется возможным. Питание главного героя данной статьи осуществляется проводным способом, поэтому дальность его полёта ограничена длиной кабеля.
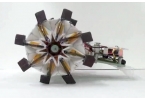
Взяв за основу модель насекомого, специалисты из Гарварда усовершенствовали своё творение, оснастив его так называемым аналогом трёх простых пчелиных глаз — прозрачных линз, выполняющих вспомогательную роль и помогающих ориентироваться насекомым вблизи. Обновлённый Robo-fly получил свои собственные светочувствительные датчики, являющиеся роботизированным аналогом органов зрения. Три встроенных в верхнюю часть механизма датчиков света, каждый из которых представляет собой четыре припаянных на пирамидообразную плату фототранзистора, позволяют крохотному роботу-мухе избежать столкновения с препятствием во время полёта и стабилизировать своё передвижение в воздушном пространстве, автоматически определяя даже горизонт и расположение солнца. Прежняя модификации имела определённые трудности с балансировкой и устойчивостью из-за своих размеров и массы.
Габариты устройства дадут возможность пробраться в самые удалённые локации, что может сыграть крайне важную роль,
к примеру, при участии в спасательной миссии и ликвидации последствий землетрясения или аварии.
Этому поспособствует и высокая манёвренность Robo-fly, управление которым, как и питание,
осуществляется при помощи провода. Кроме того, разработчики заявили об использовании их конструкции
для мониторинга окружающей среды и теоретической возможности опыления растений.
 Заложенные в летательный аппарат технические решения помогут создать автономные модели небольших роботов,
которые смогут самостоятельно перемещаться в воздушном пространстве уже без подключенного кабеля питания,
используя более совершенный аналог светочувствительных «глаз». Кроме того, протестированные датчики имеют
и биологическую ценность, подтверждая гипотезу о заложенных природой принципах функционирования простых пчелиных глаз,
помогающих насекомым ориентироваться и сохранять устойчивость во время маневрирования.
История создания летающей мухи-робота
В 2008 году нам стало известно, что разработчики роботов уже давно с завистью поглядывают на летающих насекомых,
многие из которых исполняют впечатляющие акробатические трюки, несмотря на
маленькие крылья и ещё более маленькие мозги. Ученые Гарвардского университета
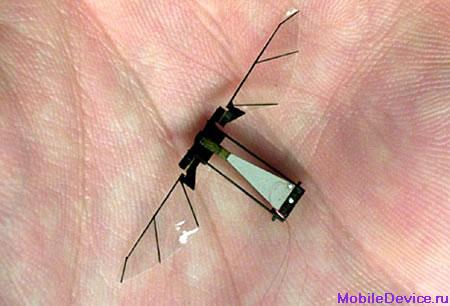
создали муху-робота размером с мелкую монету. Робот способен летать, используя
крылья, структурой и движениями напоминающие крылья мухи. Робомуха весит 60
миллиграмм (как несколько зернышек риса) и машет крыльями размером 1,5 см 120
раз в секунду. Самое впечатляющее, композитный мотор, обеспечивающий тягу
крыльям, в 5 раз более мощный для своего веса, по сравнению с мышцами настоящей
мухи.
Единственный момент – робомуха не оснащена автономным элементом
питания, и во время полета за ней тянется провод, но это третий пункт плана
разработки устройства. Вторым пунктом является намерение оснастить устройство
каким-либо элементом контроля полета, такого элемента управления на данный
момент, к сожалению, нет. Роберт Вуд (Robert Wood), разработчик мухи, в рамках
данного проекта углубленно изучает биологию.
Robo-Fly
|
Успех проекта заключается в том, что Роберт Вуд смог обратить внимание науки на
ряд вопросов, которые не возникали до того момента, как робот оторвался от
земли. Является ли, например, форма крыльев мухи результатом каких-то
биологических процессов или же она продиктована соображениями аэродинамики?
Имеет ли какие-то преимущества насекомое с четырьмя крыльями? Возникли даже
вопросы эволюционного плана: почему четырехкрылые летающие членистоногие
позднего каменноугольного периода эволюционировали на двукрылый
вариант?
Данный проект поможет ответить на многие вопросы эволюционной
биологии. Создав робота, человек поймет, почему муха столь хороша в своей роли.
Кроме того, не исключено, что подобные рассуждения получится экстраполировать и
на других биороботов.
Источник: mobiledevice.ru
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте