Эмо-роботы будут мечтать о настоящих овцах
27.08.2008, 09:00
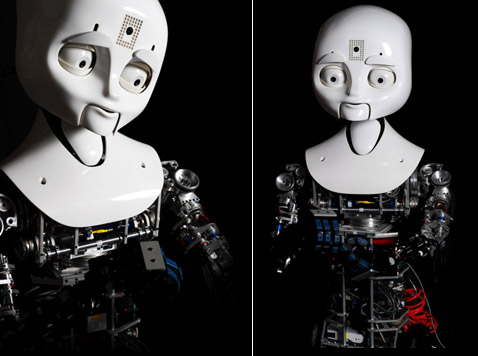
В группу разработки социальных роботов, помимо учёных из Массачусетского технологического, входят специалисты из Xitome Design (системная интеграция) и коллеги-инженеры из университета UMASS Amherst (манипулятор) (фото с сайта robotic.media.mit.edu).
Nexi, она хорошая. У неё столь живое лицо, что начинаешь общаться на равных. И её совсем не хочется расстраивать. Заботиться и ухаживать – вот что хочется. А ещё возникает непреодолимое желание пройтись по всему репертуару доступной мимики. Что и говорить, задумана девочка-робот с прицелом на будущее. Роботизированное. В общем, они уже идут за вами!
Будущее, заметим, оно уже не то, что раньше. Мир роботов Азимова, с подкупающей реалистичностью экранизированный Голливудом всего лишь несколько лет назад, сегодня не кажется чем-то заоблачно фантастическим. Хотя бы в силу того, что подумать об этом и представить во всей красе многим уже удалось. Но и технический прогресс старается не отставать. Учёные взялись за дело всерьёз, и затянувшаяся пьеса "В ожидании искусственного интеллекта" не означает, что он совсем не придёт. Наоборот, перспективы кажутся настолько осязаемыми, что возникла необходимость придать, как говорится, нашим будущим соплеменникам человеческое лицо.
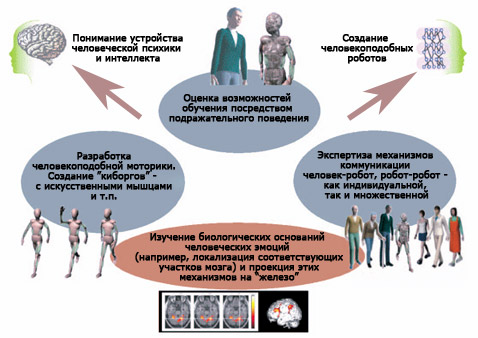 |
Принципиальная схема развития "эмоциональной" робототехники для большинства проектов выглядит примерно так. Однако, как заявляют массачусетские учёные, до сих пор обучающиеся и коммуникативные системы не были адекватно реализованы "в металле" – лишь на компьютерных тренажёрах (иллюстрация Coradeschi et al./MEMBRANA).
Впрочем, антропоморфные машины нужны исключительно для служения человеку. Охранять границы человекоподобными роботами – не совсем разумно. Для этого вполне подойдут и бесплотные сущности. Обычная колючка и датчики движения – уже неплохо. А вот "приручить" думающих роботов, помочь людям пообвыкнуть в общении с ними – совсем другая история. В конце концов, лучший интеллект на сегодняшний день – человеческий. И большинство AI-проектов (и прожектов) представляют собой некое его подобие. Логично и вполне естественно сделать соответствующую внешнюю оболочку. Именно для этих целей группа разработчиков из Массачусетского технологического института (MIT) и придумала Некси (Nexi), робота с детским лицом и недетским набором эмоций.
По официальной версии, это – "платформа для исследовательских проектов в области взаимодействия человек-робот и робот-робот". Если перевести на простой язык, это означает: подготовить людей к машинам, а последних научить ещё и между собой общаться. Каким образом? По аналогии с человеком – используя подражательное поведение, то есть имитируя манеру общения и эмоции Homo sapiens. Для этого команда из MIT задумала создать группу из четырёх андроидов – мобильных, умеренно сообразительных и имеющих человекоподобные системы коммуникации. Новый "революционный" класс самодвижущихся и общительных роботов получил название MDS (Mobile/Dexterous/Social – мобильные/сообразительные/общительные).
 |
Сходство с человеком может упростить и ускорить обучение людей общению с техникой – сплошь роботизированной по нынешним временам. Бабушки в возрасте могут и не звать внуков, если у них есть такая внучка (иллюстрация MIT).
Некси – первенец американских учёных. И она уже способна на многое. Например, на простейшие типы ответной реакции при общении с человеком. То ли ещё будет! Способность к самообучению – в духе Терминатора – ставится в проекте MDS во главу угла. Робот должен не просто демонстрировать человекоподобные ужимки, но и угадывать или, вернее, планировать свою реакцию на тот или иной раздражитель. И вести себя соответственно. В случае с Некси в качестве принципиальной основы для репликации были взяты дети. Их внутренний мир достаточно хорошо изучен, более примитивен с точки зрения формирования ответной реакции (в сравнении с "продуманными" взрослыми). И при этом непосредственен. Эмоциональная сфера ребёнка формируется в первую очередь через подражательное поведение. А образцом для подражания выступает взрослый. Человек разумный.
 |
У нексиного лица – 15 степеней свободы (иллюстрация MIT).
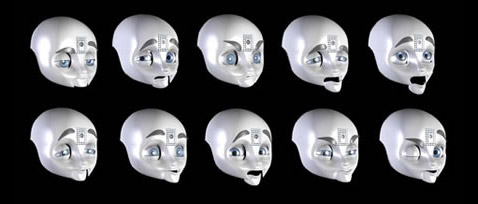
Конкретные результаты такого подхода – очень правдоподобное копирование лицевой мимики и реакции на те или иные раздражители. С технической точки зрения система мимикрии реализована не то чтобы уж очень навороченно, но достаточно замысловато. Механизм поворота девичьей шеи имеет четыре степени свободы, а сама голова движется "с человеческой скоростью", то есть максимально правдоподобно в динамике. Благодаря этому робот умеет кивать, качать головой или смотреть по сторонам. Лицо Некси способно выражать основные эмоции: она может пристально смотреть на вас, может удивлённо вскидывать брови, кокетливо хлопать ресницами или прищуривать веки, а также привлекает к экспрессии подбородок.
 |
Эмоции – врождённый механизм, но внешние проявления эмоций не всегда являются врождёнными – некоторые приобретаются в результате обучения и воспитания (например, интенсивная жестикуляция у южных народов). Этому и собираются научить девочку-робота (иллюстрация MIT).
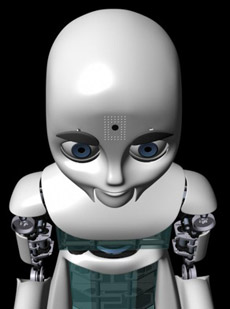
А вот и самое интересное – системы коммуникации. Глаза девочки-робота скрывают две камеры на светочувствительных фотодиодах (CCD), а в качестве "третьего глаза" установлена активная инфракрасная камера (active 3D IR camera), которая позволяет получать трёхмерные снимки окружающих предметов. С учётом того, что современная техника фиксирует многие невидимые человеческим взглядом проявления эмоций (внешние приметы которых, в свою очередь, заботливо описаны физиологами), у Некси есть все шансы стать более проницательной, чем иные люди. По крайней мере, просчитывать свою реакцию заранее – точно. Кстати говоря, органы чувств визуальной составляющей не ограничиваются: на голове установлены четыре микрофона – для "эхолокации" собеседника и – в будущем – для распознавания речи. А вот устройство для её синтезирования уже имеется. Есть и специальные тактильные сенсоры по всему телу. Пардон, корпусу.
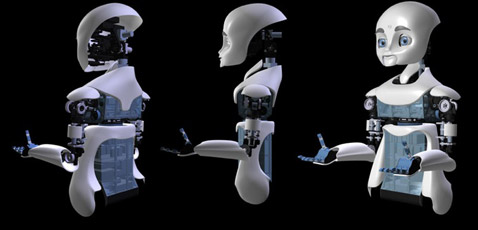
Действительно, Некси – это не только ценная мимика, но способность активно проявлять себя в пространстве. В первую очередь – передвигаться, огибая препятствия. "Тело" робота реализовано на платформе мобильного манипулятора uBot-5 работы мастеров из соседнего университета в Амхерсте (UMASS Amherst). А uBot-5, в свою очередь, построен на шасси Segway. По словам разработчиков, такая конструкция позволяет уверенно передвигаться в закрытых помещениях. У Некси есть не только "ноги", но и две полномасштабные автоматизированные руки – с хватательным механизмом, близким по своим характеристикам человеческой кисти, и вращающимся плечевым суставом, обеспечивающим "невиданную свободу движения".
<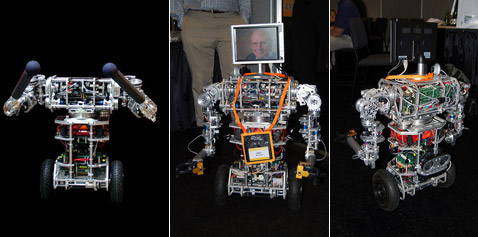 |
Усилиями обеих рук Некси может поднять около 4,5 килограмма. Длина их обусловлена не только индивидуальными потребностями робота, но и возможностью использования их в коммуникативных экспериментах – например, когда роботов MDS просят совместными усилиями поднять что-нибудь тяжёлое и перенести на другое место. На двух фото справа – платформа uBot-5 в своём первозданном виде (фото MIT, flickr.com/sbisson).
У предплечья и кистей – по пять степеней свободы. На каждой ладони по четыре пальца, один из которых указательный, а один – большой, противопоставленный трём остальным по аналогии с человеком разумным. Девочка может аккуратно что-то брать и вертеть в руках – пальцы у неё гибкие. Теоретически роботы MDS должны научиться подключать жестикуляцию к лицевой экспрессии. Источник энергии – либо литиево-ионные батареи (для автономного передвижения), либо электричество из розетки (для статичных мизансцен). Специальная система датчиков обеспечивает устойчивость и координацию движений, а ориентирование на местности и объезд препятствий возможны благодаря встроенному комнатному лазеру. Соответствующая программная оболочка реализована на базе Linux.
<
p> 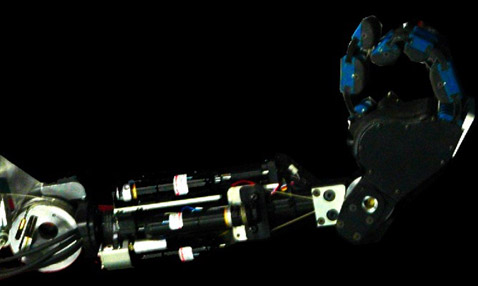 |
Пальцы робота состоят из трёх фаланг – как у человека (фото MIT).
Вот вкратце основные ТТХ эмо-робота. Пора задуматься о перспективах и осуществимости замыслов. Появления персональных роботов, призванных облегчить жизнь человеку, а где-то и разнообразить (или даже одушевить) её, в настоящий момент с энтузиазмом ждут в системе здравоохранения, ухода за пожилыми людьми (на Западе это целая индустрия) и в образовательной сфере. Хотя достижения в развитии самообучающихся роботов значительны, полностью реализовать эту концепцию без привлечения искусственного интеллекта вряд ли получится. Но к тому моменту, когда это произойдёт, надеются массачусетские учёные, всё уже будет готово к тому, чтобы упаковать интеллект в соответствующую оболочку. Это как современная электронная начинка у самолётов: без неё они на поле боя малопригодны, но и на кукурузник продвинутые "мозги" ставить бессмысленно.

Пока не понят сам человек, о возможности репликации его эмоциональной сферы говорить рано. По крайней мере, путём создания соответствующих алгоритмов. Более того, способность реагировать самым неожиданным образом – не побочный продукт, а фундаментальная характеристика человеческой психики, связанная с адаптацией (фото с сайта industryweek.com).
Немного смущает лишь то, что строгой теории эмоций не существует. Не говоря уже о том, что наука не знает, что такое "интеллект" – это, по большому счёту, условное понятие. Впрочем, многие ответные реакции можно алгоритмизировать и ручками, без AI. Но вот какая штука: человек действует только тогда, когда его действия имеют смысл. Причём речь не о каком-то идеалистическом "смысле жизни", а о вполне конкретных унаследованных биохимических комплексах, сигнализаторами которых и являются эмоции. Не совсем понятно, чем себя будут стимулировать роботы. Может, изощрёнными формами нулей и единичек, а может, и ещё чем. Но есть шанс, что их эмоции будут проявляться в совершенно неподходящих для этого ситуациях. Тогда весь проект – насмарку. Ещё среди возможных рисков, наверное, стоит упомянуть подвижность чувственной сферы, которая необходима для гибкости и адаптации. Что из этого следует? Эмоции нужно воспитывать. И для девочки Некси – по аналогии со вполне реальными детьми – это очень актуально. К чему приведёт подражание множественным "родителям" – большой вопрос.
Помимо "эмо-проекта" планируется создать симулятор виртуальной реальности для роботов MDS – в нём будут проводиться групповые "психологические" тренинги. К основному симулятору будет прилагаться дополнительный – для создания атмосферы и реализации "жёстких сценариев". Неудивительно: он разрабатывается на базе движка Unreal Tournament 2004 (иллюстрация MIT).
А в нынешнем виде антропоморфность машины может сыграть злую шутку: у человека возникнет иллюзия, что робот понимает больше, чем он может на самом деле. Но есть, есть и плюсы, конечно. Помимо собственно крутизны Некси можно упомянуть симпатичность концепции искусственного лица. Женщины-андроиды стремятся к полному "образу и подобию", оставляют после себя лёгкое чувство ужаса. От вроде бы человеческого лица как-то не по себе. Да и сама идея о подражании очень хороша. В конце концов, специалисты MIT подчёркивают, что разработка "заточена" под эмпирическую модель. С помощью Некси и её будущих братьев и сестёр они хотят понять, что люди ожидают от роботов и в какой степени они это получат. Иначе чем посредством опыта это сделать действительно невозможно.
|
Ключевые слова: Роботы с чувством робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте