Забудьте "Девочку на шаре". Смотрите: на шаре мобильный робот. Этот шар для него — и ноги, и колёса, и гусеницы. В общем, точка опоры, с помощью которой он переворачивает мир робототехники и, заодно, компьютерную мышь. Как так? А вот так.
Чего мы хотим от роботов? Конечно, практичности и мобильности. Сейчас у них это есть. Однако всё то, что существует в этой области сейчас, по части удобства может быть охарактеризовано как громоздкое и неповоротливое.
Энтузиасты из университета Карнеги-Меллона (Carnegie Mellon University) Том Лауэрс (Tom B. Lauwers),
Джордж Кантор (George A. Kantor) и Ральф Холлис (Ralph Hollis) давно занимаются всевозможными разработками,
связанными с роботами, и считают такие проблемы крайне актуальными.
Вся их работа имеет под собой некую концептуальную основу. Они, в частности, утверждают, что статичные роботы – те,
которые совершают операции, находясь на одном и том же месте, равно как и всяческие роботы на многочисленных колёсах –
это тупиковая ветвь развития робототехники.

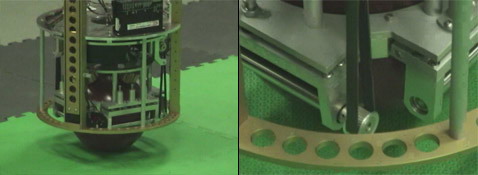
Даже не сомневаясь в устойчивости, разработчики боллбота на случай падения натянули на него резиновое колесо. Внешнему виду боллбота в его настоящем состояния, впрочем, это не повредило (фото с сайта msl.ri.cmu.edu).
Как же могут эти роботы помогать людям, когда они, того и гляди, могут сами потерять равновесие, опрокинуться, и к ним самим придётся спешить на помощь, считают исследователи.
Дополнительные точки опоры решают проблему лишь отчасти, порой добавляя ещё неповоротливости. И вообще, этих опор нужно сделать меньше, лучше всего одну, — считают американские специалисты.
Примерно этим путём команда робототехников, возглавляет которую профессор Холлис, пришла к идее нового исполнения опоры робота – в виде сферы. Так и появилась мысль о создании своего "Боллбота" (ballbot — от английского ball — шар; не путать с марсианскими Ballbots) – нового веского слова в изобретательстве.
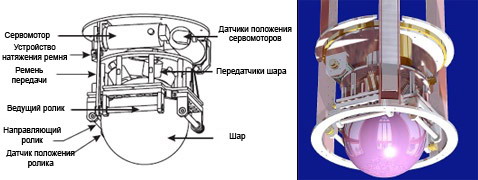
Устройство главной части боллбота, которую его создатели называют "инвертированным шариком мыши" (фото с сайта msl.ri.cmu.edu).
Как утверждает этот коллектив, в основе подхода – создание мобильного, безопасного и устойчивого робота. Поэтому, опять-таки, по их словам, вышел боллбот "шустрым и грациозным".
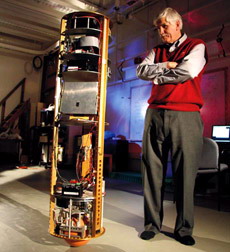
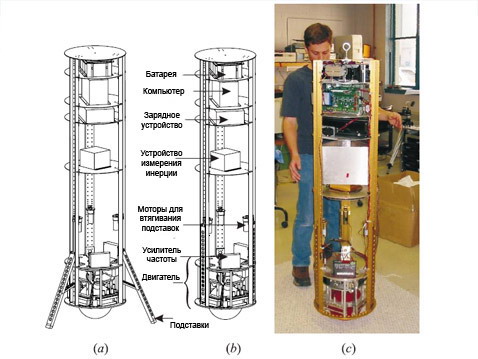
После многочисленных испытаний и промежуточных версий боллбот в сегодняшнем виде – полутораметровое устройство весом в 45 кило. Представляет оно собой фактически цилиндрическую этажерку с полками, на которых установлено всякое оборудование, и шаром с моторами внизу.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте