Роботы, роботы, роботы…
04.04.2005, 09:10
Автор: Кристофер
Модульные роботы или системы-трансформеры
Представьте себе ситуацию, если бы структурные элементы игрушки Lego, либо
другого подобного конструктора могли вести себя по-разумному. То есть,
собирались бы самостоятельно в определенные конструкции… Именно такая идея
сейчас разрабатывается многими изобретателями-робототехниками. Причем
исследования идут сразу в нескольких направлениях…
Самые долговременные проекты касаются создания однотипных модулей, совокупность
которых ведет себя как единое целое. Например, они могут по команде собираться в
здание или стену, или же в движущиеся объекты. Данные модули могут
функционировать отдельно, группами либо единым целым. Эти идеи распространены
как для обычного, так и нано- миров. Например, самособирающиеся солнечные
батареи для космических станций, либо нано-роботы-строители — это варианты
реализации одной и той же идеи.В данном случае возникает одна достаточно
интересная и уникальная проблема, попытки решения которой озвучиваются с
периодичностью чуть ли не раз в месяц — создание искусственного коллективного
разума.
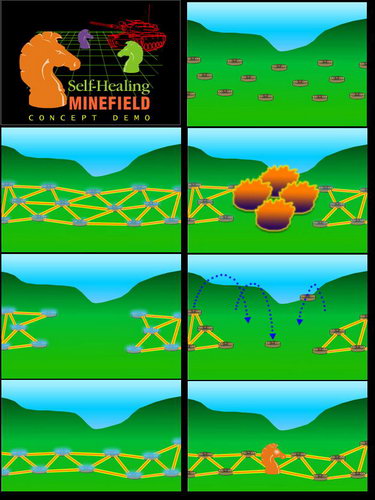
Например, мы описывали так называемые «разумные» или «самозаживляющиеся» минные
поля, в которых совокупность мин выполняет определенную функцию — покрытие
заданной площади. При взрыве одной из них, другие перегруппировываются, изменяя
свою расстановку таким образом, чтобы площадь оставалась «покрытой». С одной
стороны может показаться, что решение данной задачи является очень простым —
достаточно иметь центральный командный компьютер, который может управлять каждой
миной по отдельности. При взрыве мины, программа компьютера заново рассчитывает
расстановку и дает определенные команды.
«Самозаживляющиеся» минные поля
Но данное решение не является оптимальным, поскольку требует организацию беспроводной связи на удаленные расстояния и т.п. Как оказалось, гораздо проще реализовать решение данной задачи на другом уровне…
«Стадное чувство»…
Особое внимание сейчас уделяется изучению целеустремленного массового движения среди биологических форм (рыбы, птицы, насекомые). Данные формы не обладают высокой долей интеллекта, но вместе с тем подвержены так называемому «стадному» чувству и ведут себя в коллективе как единый организм. Британский доктор Иэйн Кузин (Iain D. Couzin) из Принстона (Princeton University) и его коллеги из Оксфорда (University of Oxford) решили более подробно изучить данный вопрос, и создали для этих целей специальную компьютерную модель. Результаты исследований получились достаточно интересными — в данной «коллективной» модели поведения отсутствует сложная коммуникация, а участники группы руководствуются только двумя-тремя простыми правилами. Главным условием коллективных действий является желание одних участников держаться в группе, и желание других ее участников (лидеров) двигаться в определенном направлении.
В принципе, желание одних биологических объектов находиться около других предусмотрено природой в рамках инстинкта самосохранения и на уровне подсознания (как пример, общеизвестный факт — сельдь, отлученная от сородичей, умирает от стресса). В рамках проведенных исследований указано условие — члены группы должны всеми силами стараться избегать столкновений друг с другом, то есть, двигаться совместно, но на безопасном друг от друга расстоянии. Большая часть существ, желающая оставаться в группе, беспрекословно повинуется лидерам, количество которых намного меньше общего числа. Причем «лидеры» не отличаются каким-то сверх-разумом, а являются обычными представителями особей данной группы.
Исследования Иэйна Кузина достаточно грамотно иллюстрируют, как, используя нескольких «лидеров» и достаточно легкий в программировании «коллективный разум», можно создавать, например, исследовательские группы роботов и т.п.
Возвращаясь к минным полям…
Если каждая мина из общего числа будет анализировать информацию по своему месторасположению относительно других, и иметь способность перемещаться и выбирать оптимальные значения расстояний, то реализация «коллективного разума» такого минного поля будет происходить на самом примитивном уровне — не нужно никаких супер-компьютеров и т.п. В данном случае каждая мина — это участник группы.
Crystalline
Иэйн Кузин сотоварищи затронул действительно интересную проблему, но, сейчас говоря о «коллективном разуме роботов», мы подразумеваем несколько другое понятие, и иерархию — малофункциональные управляемые модули и единый командный центр.
В лаборатории робототехники Дармутского колледжа (Dartmouth Robotics Lab) профессор Даниэла Рас (Daniela Rus), Зак Батлер (Zack Butler) и их коллеги создали два опытных образца и виртуальную модель "двумерной самореконфигурируемой модульной системы". Называется она Crystalline. Саму разработку нельзя назвать успешной, хотя она ведется с конца 90-х, да и к тому же к ней подключились специалисты из Массачусетского Технологического Института (MIT).
Задача, которую решают создатели Crystalline — формирование различных по форме объектов из однотипных модулей. Причем название «Crystalline» относится не к проекту, и не к модулям, а к их коллективному поведению. То есть, Crystalline — это робот, состоящий из множества одинаковых объектов и способный менять форму в зависимости от ситуации.
Началось все с составления виртуальной модели, и нужно отметить, в ней все работало отменно — объекты группировались в различные простые и сложные пространственные геометрические фигуры и формы (например, в форму собаки).
«Атомы» Crystalline
С «железной» реализацией дело пошло гораздо хуже. Исследователи создали два типа модулей, назвав их «атомами». Каждый из них имеет квадратную форму, оснащен двигателем, микропроцессором и инфракрасным датчиком. Изначально были поставлены самые простые задачи, а именно создание фигур только в горизонтальной плоскости (2D). Их выполнение протекало медленно и не всегда корректно.
Хотя, не совсем определенно сказано о реализации реальных испытаний, например, непонятно, каким образом программировались задачи.
Ведь, по существу, Crystalline разрабатывается как полиморфный робот, способный самостоятельно принимать решения по изменению своей формы в зависимости от обстоятельств. Например, он движется в некоем определенном направлении и встречает сложное препятствие. Как один из вариантов действий — разбиение всей структуры на несколько групп, преодоление препятствия и обратное соединение модулей в первоначальную форму. Пока же «атомы» работают на уровне изучения азов строевой подготовки — 12 модулей, стоящих в одну линию, могут разбиваться на четыре группы по три «атома».
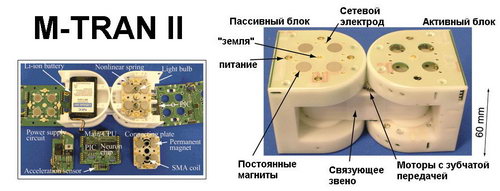
M-TRAN II
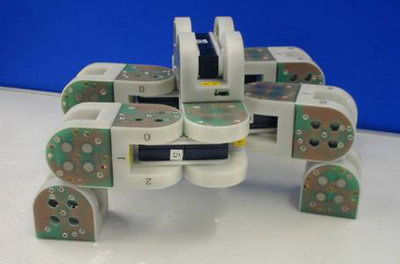
Японский Национальный институт передовых индустриальных наук и технологий (AIST) также заинтересовался модульными системами, и на сегодня они могут гордиться своей разработкой "самореконфигурируемой модульной системы" — M-TRAN II (аббревиатура от Modular TRANsformer).
Это достаточно интересное изобретение, предусматривающее возможности создания сложных структур из однотипных модулей, состоящих из двух частей — пассивного и активного блоков (см. рисунок). В пассивном отсеке находится элемент питания, постоянные магниты, расположенные на внешних сторонах корпуса, модули CPU и другие электронные элементы. Активный блок также имеет систему постоянных магнитов, но они расположены на специальных коммутационных платах. Активный и пассивные блоки соединены специальным связующим звеном с двигателями, позволяющим делать отклонение в пределах 180 градусов. При коммутации нескольких модулей, активные блоки одних присоединяются к пассивным других, и наоборот.
Из данных модулей можно собирать целые структуры, в частности, на сайте исследователей можно увидеть всевозможных змей, 4-х-6-тиногих тварей и т.п.
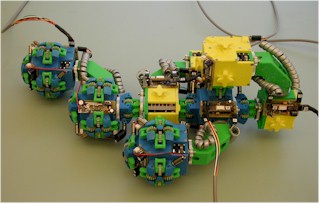
The Molecule Robot
Дармутский колледж, разработавший Crystalline, также не остался в стороне и предложил решение, подобное M-TRAN, назвав его The Molecule Robot. Структурные элементы, как понятно, названы «молекулами». На первых стадиях разработки были изобретены однотипные модули, соединяющиеся между собой с помощью электромагнитов, как и в M-TRAN. Но это решение дартмутским исследователям показалось не совсем эффективным, поэтому во втором варианте «молекул» они попытались его усовершенствовать, а в третьем и вовсе отказались от электромагнитных вариантов соединения. Вместо них было предложено использование парных «женских» и «мужских» модулей с возможностями зубчатого соединения.
Программно The Molecule Robot управляется на двух уровнях — низкоуровневом ассемблерном коде процессоров самих «молекул», высокоуровневых программах внешней рабочей станции. Пока вся система доступна только в виде виртуальных эмуляций. Об испытаниях реальных моделей пока информации нет.
Подытожим…
В вариантах Crystalline, M-TRAN II, The Molecule Robot мы имеем практически один и тот же подход в области реализации «коллективного разума» — каждый модуль-элемент наделен минимумом необходимых разумных функций, позволяющих работать с некоторой долей самостоятельности, а «основной мозг» в виде командного компьютера является главным модулем управления.
Исследования Иэйна Кузина показывают другую сторону решения данной проблемы. К сожалению, пока слабо изученную. Суть ее состоит в том, что группа объектов ведет себя, руководствуясь решениями «лидера» или группы «лидеров», существенно не отличающегося (отличающихся) от других по разуму. В этом случае нет необходимости в создании сложных форм искусственного интеллекта, и достаточно соблюдения самых простых правил коммуникаций.
Учитывая тот факт, что самые современные роботы сейчас не намного умнее муравья, индустрии, так или иначе, нужно будет пройти этап реализации «коллективного разума», то есть пойти по пути эволюции.
В завершении
Как и говорилось во вступлении, индустрия от теории в розовых тонах перешла к рутинной практике. Я думаю, что вполне реальны планы министерства обороны США по роботизации армии к 2025 году. Правда сделано это будет, скорее всего, самым простым и очевидным способом — распределение функций между роботами и командным центром. Гонки DARPA Grand Challenge должны показать, на какую долю самостоятельности вообще могут рассчитывать современные роботы.
|
Ключевые слова: роботы роботы… модулей группы Crystalline форму объектов задачи модули Molecule решения Robot лидеров уровне коллективного элементы разума реализации системы Роботы роботы роботы… Военные роботы робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте