02.10.2004, 09:34
Автор: Кристофер
Место действия - обыкновенное поле возле шоссе на окраине Рочестера (штат Мичиган), организаторы - Оклендский университет (Oukland Unevercity), время действия - начало лета, участники - 27 команд из ведущих технических университетов США.
Достаточно большой и яркой фигурой в древнегреческой философии был ученый Аристотель, живший с 384 по 322 гг. до н.э. Он, как и многие его предшественники, типа Платона создал свое учение о государстве. В большом труде "Политика", Аристотель пришел к выводу, что существует три основных типа государственного строя, а именно, монархия, аристократия и демократия.
Но (!) при всем при этом, ученый был идеологом рабства и рабовладельческого строя, т.е. любой из типов описанных им государств не мог обойтись без тех, на чьи плечи возлагалось выполнение тяжелого труда. Если смотреть на сегодняшний день с позиций Аристотеля, то описанные им типы государственных строев сохранились, а вот современные рабы - это машины и роботы, которые пришли на замену людям. Да и само рабство отменили практически недавно, с появлением научно-технического прогресса.
И все его последние достижения (компьютеры, беспроводная связь,GPS) имеют прямое отношение к соревнованиям роботов - наших будущих солдат и помощников.
Intelligent Ground Vehicle Competition (IGVC)
Гонки беспилотных наземных машин IGVC (www.igvc.org) являются преддверием грандиозных состязаний века DARPA Grand Challenge 2005. Правда, в первом случае мы говорим о соревнованиях среди студентов американских университетов с призовым фондом в несколько десятков тысяч долларов, а во втором - о $3 млн, за кои будут сражаться крупнейшие корпорации, их коалиции, лаборатории, НИИ и университеты.
Несмотря на такую большую разницу в призовых фондах, цели у обоих соревнований являются общими - создать машины, способные самостоятельно перемещаться по заданной местности (природному ландшафту), без управления с помощью человека либо другого живого организма.
В 2004 году IGVC предусматривало три типа соревнований, а именно:
- Autonomous Challenge. Гонка по извилистой трассе с препятствиями (полностью автономное управление). К каждому роботу прицеплен груз.
- Navigation Challenge. Выполнение определенных заданий, связанных с навигацией с помощью системы глобального позиционирования (GPS). К каждому роботу прицеплен груз. Задача - доставить его в определенные точки, отмеченные на карте.
- Design Competition. На каждого робота студенты готовят подробную документацию, которую представляют в рамках аудитории. Оценивается полнота изложения, оформление и т.п.
В прошлом, 2003-м, году IGVC предусматривала еще один вид состязаний - гонки за лидером (Follow the Leader), где робот должен был точно следовать за движущейся тележкой, управляемой человеком. В 2004-м такого вида соревнований не предусматривалось. За такой небольшой разницей, IGVC этого года были подобны предыдущим.
Начало
Первым шло состязание дизайнов, где 27 команд представило свои модели. На проекторе демонстрировалась рабочая документация, жюри оценивало внешний вид каждого робота, визуальную информацию о нем и качество изложения докладчиков (!). Скачав несколько PDF-файлов с описаниями, могу отметить, что они стали еще подробнее и нагляднее по сравнению с такими же, но прошлого года.
 Конкурс дизайна Конкурс дизайнаВ результате было выбрано три победителя ($1000 за первое место), и команды отправились на пит-стопы, где стали крутить гайки, проверять и настраивать оборудование, производить тестовые выезды на трассу.
 На пит-стопах кипит работа… На пит-стопах кипит работа… Кто-то настраивает ПО, а кто-то и гайки завинчивает… Кто-то настраивает ПО, а кто-то и гайки завинчивает…После того как шум настройки и рев моторов закончились, состоялась торжественная церемония открытия, на которой выступили директор центра исследований в области танкостроения армии США U.S. Army TARDEC Ричард Макклеланд (Richard McClelland) и президент ассоциации соревнований автономных роботов в воздухе и под водой AUVSI Дьэр Донниторн-Тэйт (Dewar Donnithorne-Tait). И, наконец, после всеобщей линейки стартовали соревнования по навигации.
 Построение команд на торжественную линейку. Открытие… Построение команд на торжественную линейку. Открытие… Приветственную речь зачитывает директор центра исследований в области танкостроения армии США U.S. Army TARDEC Ричард Макклеланд Приветственную речь зачитывает директор центра исследований в области танкостроения армии США U.S. Army TARDEC Ричард МакклеландNavigation Challenge. Соревнования на расторопность
Задачей участников было объехать с грузом все точки доставки, отмеченные на карте большими кружочками, а в реальных условиях - большими светлыми кругами на поле. При этом на пути следования от одного пункта к другому необходимо было объезжать препятствия (бочонки либо горизонтальные указатели с широкими белыми полосами).
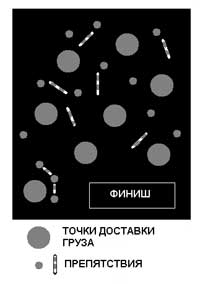 Карта состязаний по навигации Карта состязаний по навигацииПо правилам Navigation Challenge все игровое поле вносилось в бортовые компьютеры и запоминалось в виде карты, и роботы могли связываться с системой GPS, используя любую систему координат (в метрах, градусах долготы и широты). То есть, Navigation Challenge сравнима с решением задачи с известными переменными, с работой почтальона или разносчика пиццы. Как говориться, "тут главное не напортачить".
На данном этапе следует рассказать немного и об устройстве роботов участников. Для преодоления препятствий они могли использовать обыкновенные ультразвуковые датчики дистанции, для нахождения белых кругов - так называемое "бинарное" зрение. Что стоит под последним понятием? Достаточно стандартное решение - все данные, полученные с видеокамеры, робот превращает в бинарный вид, т.е. только в черный или белый цвета.
Таким образом, для прохождения Navigation Challenge достаточно иметь ультразвуковой датчик, видеокамеру, GPS-устройство и специальное ПО. Далее идут блоки логического анализа, выработки решений и приведения команд в исполнение, которые мы затрагивать не будем.
Кстати, в реализациях роботов могли быть предусмотрены и более сложные варианты. Помните, что и препятствия имеют белые линии? И, кстати, у части роботов использовалось как минимум два типа видеокамер, один из которых отвечал за зрение вокруг (белый - это "табу" - препятствия), второй следил за поверхностью земли (белый - это "цель" - точка доставки груза). В общем, предусмотрительные участники использовали все, что можно по-максимуму, хотя соревнования в рамках Navigation Challenge не требовали такой сложности - она понадобится потом...
 Робот Optimius самостоятельно добрался до одной из целей Робот Optimius самостоятельно добрался до одной из целейС заданием справилось полностью всего 4 команды (достигли всех 9 точек (включая финиш)), причем лидеры объехали всю дистанцию за 2-3 минуты.
Autonomous Challenge или высший машинный пилотаж
После Navigation Challenge подошло время автономных гонок, и игра в них разыгралась не на шутку. Задание этого состязания является на порядок более сложным.
 Карта Autonomous Challenge… Карта Autonomous Challenge…Карта Autonomous Challenge представляет из себя трассу, а именно извилистую тропинку, очерченную с двух сторон белыми линиями. На пути следования, естественно, стоят препятствия, а также предусмотрено два участка для увеличения сложности - мост и "грязь". Данный вид соревнований предусматривает полную автономность, карта трассы не загружается в память бортовых компьютеров, GPS не используется. Помните, мы говорили, о двух видах "бинарных" камер - теперь для обоих вариантов белый цвет представлял собой "табу". То есть нельзя было выезжать за границы трассы, а также сбивать препятствия.
Многие роботы запутывались, и как вариант, могли несколько раз менять направление (направляться к старту, бесконечно ездить между двумя препятствиями). Хуже всего, конечно, - это выезд за линию, что сразу подразумевало конец участия.
Полноценно финишировало только две команды, что отличает автономные гонки этого года от прошлого, когда до конечной точки трассы не добрался никто.
 Вот так сбивают препятствия… Вот так сбивают препятствия… Робот Vasilius покоряет трассу Робот Vasilius покоряет трассу Природный ландшафт предусматривает некоторые трудности. Данный робот не может выехать из лужи… Природный ландшафт предусматривает некоторые трудности. Данный робот не может выехать из лужи… … поэтому наиболее предусмотрительные команды сделали машину на гусеничном ходу. … поэтому наиболее предусмотрительные команды сделали машину на гусеничном ходу.В завершение
Ну, что ж, ситуация с соревнованиями этого года обнадеживает, поскольку в Autonomous Challenge без чьей-либо помощи роботы стали приходить к финишу. Маловероятно, но возможно, что в DARPA Grand Challenge к финишу начнут приходить также, хотя бы в ближайшие несколько лет. Ведь вся проблема закручена не на техническом несовершенстве двигательных механизмов и колес, а на "искусственном мозге" данных машин. Например, наблюдая гонки IGVC 2004, я увидел множество роботов из прошлых соревнований. Внешне они не изменились, но было улучшено ПО, системы управления, датчики и т.п.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
