12.07.2010, 19:54
Автор- Курмис Александр, г. Санкт-Петербург, Россия.
Источник: www.kurmis.nm.ru
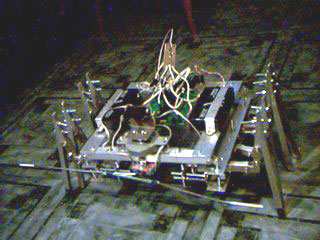
Общие данные
Мобильный робот шагающего типа.
Силовая установка: герметичные свинцово-кислотные аккумуляторы.
Двигатели: 12V 1A X2(по одному на каждый борт)
Электронная часть основана на микроконтроллере ATMega8535 фирмы Atmel.
Габаритные размеры: 300Х500Х200 см
Вес: 2,5 кг
Тяговое усилие (рабочее): 10 Н
Тяговое усилие (максимальное) 40 Н
Время непрерывной работы: 15 часов
Подвеска: по одной пружине на каждый борт
Рама: алюминиевые профили
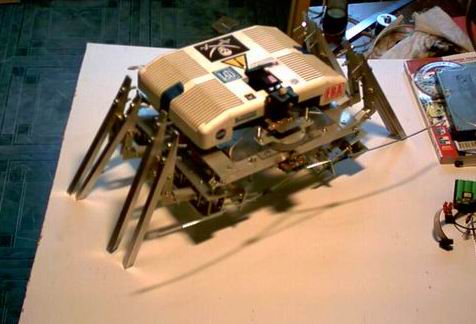
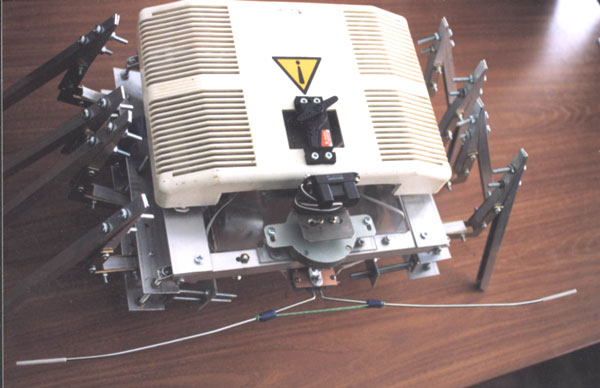
Механика
Процесс шагания основан на кривошипно-шатунном механизме. Сами ноги
подвешены к кривошипным шестерням через карданные механизмы. Шестерни
поставлены в ряд и связаны друг с другом, с двигателем и с датчиком
вращения.
Электроника
Электроника основана на программируемом контроллере. Он получает сигналы
от датчиков и управляет исполнительными механизмами. Из дополнительного
оборудования используется интерфейс RS-232 (COM-порт) и 8-битный АЦП.
Характеристики микроконтроллера:
Архитектура: RISC
Разрядность: 8 Бит
Тактовая частота: 16 МГц
ПЗУ программы: 8 Кбайт (Flash)
ПЗУ данных: 512 Байт (EEPROM)
ОЗУ: 512 Байт
Спец-функции (задействованные): RS-232, ADC.
Исполнительные устройства:
Блок управления двигателями - основан на электромагнитных реле.
Сервопривод (пока не задействован) - контролируется непосредственно процессором.
Датчики:
Контактные датчики (усы): подключены к входам внешних прерываний процессора.
Радар: подключен через АЦП, пока не запрограммирован. Идут испытания
системы на более простом роботе. Ожидаемый диапазон действия от 20 до
200 см. Используется инфракрасный лазерный измеритель расстояния фирмы
Sharp.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
