12.07.2010, 19:54
Цель этого проекта - создание платформы для робота.
Количество двигателей- 2, количество ведущих колес-2.
Третье колесо крутится на подшипнике во все стороны,
обеспечивая подвижность и управляемость робота.
Платформа - отрезок оргстекла.
Колеса - от колеса офисного стула. Там есть два черных
колеса, которые я снял, просверлил отверстия и надел
на ось. Колеса проскальзывали, поэтому пришлось увеличивать
кф. сцепления изолентой.
Третье колесо - от мебели (можно купить в магазине
стройматериалов или материалов для мебели).
Редуктор - самодельный. Шестеренки куплены на радиобазаре.
Количество- 3 штуки на колесо. Оси- спицы для велосипеда.
Шестеренка на валу двигателя- тоже куплена на радиобазаре.
Самое главное- основа редуктора. Сделана из листовой
оцинкованной жести на стройбазаре (можно поискать
по объявлениям людей, которые делают под заказ отливы
для крыш частных домов и дач. У них наверняка можно
купить обрезки жести. Также нужно найти инструмент,
которым резать жесть. Я взял ножницы для жести - 2.5
доллара). Расчеты- на бумажке, из неё же делается
шаблон, приклеивается скотчем к жести и вырезается.
Дрелью сверлятся отверстия. Самое главное здесь- допуски.
Чуть-чуть не попал- и всё, шестеренки либо крутятся
"со скрипом", либо проскакивают. По этой
причине проект пока и не закончен.
Двигатели куплены в Москве в магазине "Чип и
Дип"( ДВ-3 по-моему). Можно использовать любые,
в том числе от автомагнитол и от CD-ROMов. Соответственно,
под них рассчитывать основу редуктора.
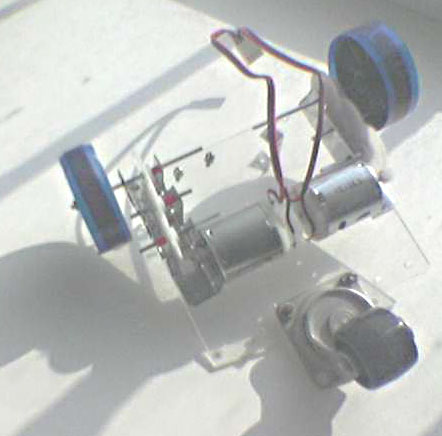
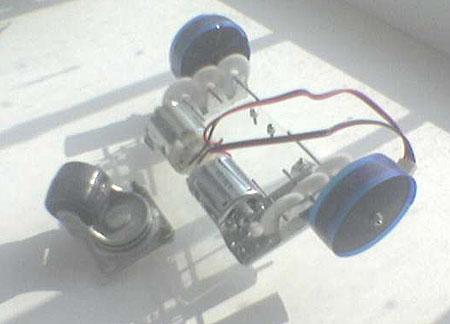
К сожалению, нет цифрового фотоаппарата, только веб-камера,
поэтому не могу дать чёткие снимки. Если есть вопросы
по технологии изготовления платформы, пишите.
А вот и фото:

Шульга Александр. 2004 год. Киев.
|  Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
