Голландский андроид Flame ходит с огоньком
29.05.2008, 10:59

На данный момент скорость передвижения составляет 0,45 метра в секунду. Робот приводится в движение семью электромоторчиками (фото Technische Universiteit Delft).
Когда и почему предки человека стали ходить на двух ногах, учёные всё ещё спорят. Нет даже чёткого представления о том, в какой момент древние антропоиды спустились с деревьев. Зато мы будем точно знать, когда возник первый robotus erectus – робот прямоходящий. Возможно, прародителем нового вида будет голландский "Огонёк" — Flame.
Презентация этого чуда современной техники состоялась в рамках международной конференции по проблемам активной ходьбы Dynamic Walking 2008. Автор разработки – Даан Хоббелен (Daan Hobbelen) из Делфтского технического университета (Technische Universiteit Delft). Именно он создал новый алгоритм перемещения в пространстве, который, как утверждается, наиболее точно воспроизводит движения людей. На самом деле причина возникновения прямоходящей походки у человека – не просто случайная прихоть природы, а эволюционно обусловленная необходимость. Передвигаясь на двух ногах, мы постоянно смещаем центр тяжести и как бы немного падаем вперёд, сами того не замечая. Это нестабильное движение позволяет в значительной мере экономить энергию, прикладывая минимум усилий.
 |
Планета Шелезяка: полезных ископаемых нет, воды нет, растительности нет, населена роботами. Вот что представляет собой настоящая эволюция прямоходящих роботов. И протекает она, кстати говоря, гораздо быстрее биологической (слева направо и сверху вниз): Stappo – 1995, Simplest Walker – 1999, Bob -2000, Baps – 2001, Museon Walker – 2001, Mike – 2002, Max – 2003, Denise – 2004, Meta – 2005. Правда, на разработку новой модели понадобилось целых три года – серьёзная вещь (фото Technische Universiteit Delft).
Но именно кажущаяся простота шага, отшлифованная миллионами лет эволюции, – настоящий вызов для специалистов по робототехнике. Реализовать человеческую походку на практике очень и очень сложно. Ступая вперёд, человек наклоняется и "начинает падение", которому препятствует выдвинутая нога. Такой процесс – результат сложной и скоординированной деятельности многочисленных групп мышц. Ими, в свою очередь, управляет многоуровневая иерархическая система соответствующих импульсов головного мозга.
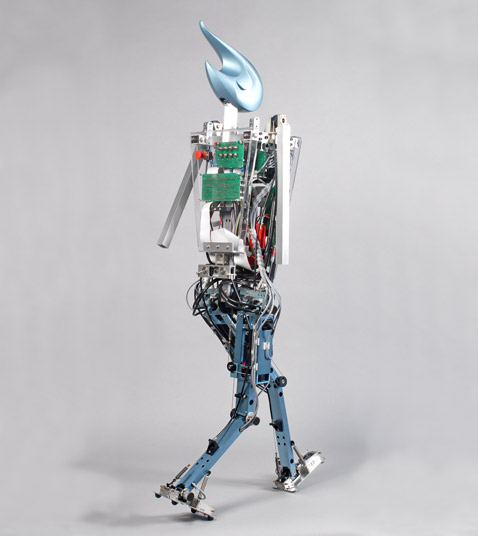 |
Вес "Огонька" – около 15 килограммов, рост – 1,3 метра. Он может переступать (в буквальном смысле) через препятствия высотой до восьми миллиметров (фото Technische Universiteit Delft).
Построить робота, просто перемещающегося в пространстве из точки А в точку Б, – тоже задачка не из лёгких. В частности мы уже писали о ковыляющем роботе, установившем рекорд дальности ходьбы. Этот рекордсмен очень напоминает первые самодвижущиеся модели на иллюстрации вверху. Видимо, некий эволюционный путь, пусть и искусственный, для решения столь сложной задачи неизбежен. А для создания человекоподобной (и наиболее энергоэффективной) походки требуется решить проблему ещё более высокой сложности: спроектировать схему управления равновесием в динамическом режиме.
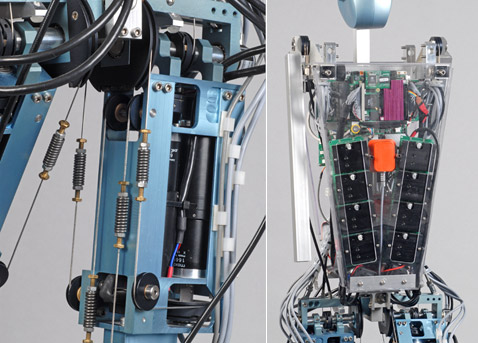 |
В качестве примера имитации двигательного аппарата человека Даан демонстрирует "лодыжку" Flame (слева). Привод этой части ноги реализован в виде группы специальных пружин – они выполняют роль сухожилий и очень близки к ним по эластичности. Ещё один важный компонент системы – инерциальные датчики производства компании Xsens (справа), обладающие самой высокой точностью измерения положения в пространстве (фото Technische Universiteit Delft).
Почему всё это важно? Потому что поможет глубже понять принцип передвижения самого человека. Что, в свою очередь, позволит людям, которые восстанавливаются после травм или имеют другие осложнения, улучшить реабилитационные методики и создать специальные вспомогательные устройства для тренировок. Вообще говоря, Делфтский университет является одним из пионеров в области создания самодвижущихся роботов. Можно сказать, что голландские учёные решили застолбить эту нишу. Новые разработки в области механики двигательного аппарата должны закончить эру неловких, зомбиподобных походок у железных братьев наших меньших. Да и больших тоже.
 |
Как вы можете видеть, "производственные мощности" одного из ведущих в мире исследовательских центров робототехники весьма скромные. Такое чувство, что отряд тимуровцев решил на досуге свинтить что-нибудь бесполезное из остатков собранного на субботнике металлолома (фото Technische Universiteit Delft).
Даан Хоббелен говорит, что многоуровневая система управления впервые позволит роботам быть более пластичными и энергоэффективными. Сравняться с людьми то есть. Голландец утверждает, что его разработка – это первый электронный гуманоид, который одновременно и устойчив, и потребляет сопоставимое с человеческим организмом количество энергии. По его мнению, технологический прорыв состоит в разработке наиболее продвинутой математической модели двигательных функций человека. Основу изобретения составляет некий прототип вестибулярного аппарата – с его помощью происходит анализ информации о движении, и робот не теряет равновесие, переставляя ноги. По словам автора, Flame – самый продвинутый прямоходящий робот в мире. По крайней мере среди антропоморфных, то есть копирующих движения человека, машин. В качестве мышечного "привода" в нём используются электромоторы. Программное обеспечение, между прочим, на базе Linux.
На первый взгляд, результаты не сильно впечатляют. Особенно стороннего наблюдателя, далёкого от проблем разработки биомеханических систем. Но заложенные в конструкции ресурсы – "железо" – позволят в будущем существенно улучшить все параметры ходьбы. По мере того как софт будет доводиться до ума. Предлагаем вам самим сравнить походку "Огонька" с самым известным на сегодняшний день роботом-гуманоидом – ASIMO, о котором мы писали многократно. Например, о том, как он разносит кофе или в очередной раз наращивает интеллект. Что там говорить, ASIMO – настоящая звезда.
Вроде бы японец выглядит более подвижным и устойчивым. Он даже умеет поворачивать чуть ли не на бегу. Но всё-таки передвигается "на полусогнутых" – не так, как человек. На наш взгляд, походка голландца более соответствует своему прототипу. Будем надеяться, что не историческому. Отметим, что просто ходьба – это только вершина айсберга. В течение нескольких лет разработчики из Делфта планируют добиться ещё более грандиозных успехов в эволюции robotus erectus. Например, добавить им "органы чувств" и некое подобие искусственного интеллекта – для интерпретации полученных от окружающего мира сигналов. Впрочем, искусственный интеллект это, как говорится, совсем другая история. Зато, по мнению учёных, дальнейшее развитие двигательных алгоритмов и соответствующего "железа" позволит роботам очень резво бегать.
 |
Знакомьтесь: TUlip – участник сборной Нидерландов на чемпионате по футболу среди роботов (2008 RoboCup Soccer) в китайском Сучжоу. Только пока в таких состязаниях выступали небольшие машины – от наноботов до коробочек на колёсах. А андроидов, способных бросить вызов человеку, мы ещё не видели (иллюстрация с сайта eurekalert.org).
Технологии, опробованные на Flame, уже в самом ближайшем будущем могут привести к созданию самодвижущегося робота нового поколения. И с его помощью можно будет не только помогать людям, но и развлекать их. Голландцы даже хотят сделать настоящую футбольную команду. И ездить с выступлениями по городам и весям. Футбольные симуляторы ведь уже давно и успешно существуют – команда противника, управляемая компьютером, умеет действовать и самостоятельно. Осталось реализовать всё это "в металле".
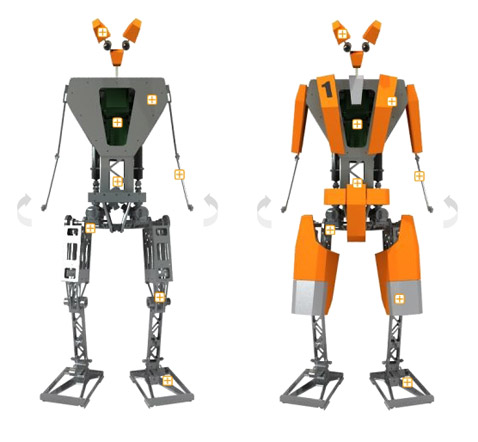 |
"Футболист" без формы (слева) и в форме (справа). Его высота – 1,2 метра. Скорость передвижения на данный момент составляет 0,5 метра в секунду. Каркас состоит из анодированного алюминия – за счёт этого достигается лёгкость конструкции. Бегать без подзарядки TUlip может в течение 30 минут (иллюстрация с сайта dutchrobocup.com).
К 2050 году планируется создать полностью автономную команду, которая выиграет чемпионат мира по футболу… среди людей. У бразильцев, например. Будет также создана юниорская лига. Только отбирать туда станут не по возрасту, а по росту: допускаются участники высотой до 1 метра. Дриблингу их будут обучать мастера футбола из Нидерландов. Быть может, сам Гус Хиддинк. Почему "юниоры"? Видимо, потому что у невысоких роботов лучше устойчивость. В программу обучения войдут: максимально быстрое пересечение футбольного поля, визуальное восприятие положения мяча в пространстве, координация действий между членами команды и многое из того, чему настоящие футбольные тренеры обучают своих воспитанников. Даже сложно предположить, какие ещё возможности открываются с созданием прямоходящих гуманоидов. Да что там футбол! Представьте, что машина будет бегать за чем-нибудь вам нужным – как в фильме "Я, робот" (I, Robot). Главное, чтобы уникальными способностями роботов не воспользовался какой-нибудь коварный злодей.
|
Ключевые слова: Футболист Голландия Андроиды робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
