04.08.2010, 12:30
Источник: автор: Полищук Олег olllejik@gmail.com
Цели: Этот проект – это мой первый серьезный робот(Рис.1). Его цель – объехать комнату вдоль стены и составить её план, записав его в память(EEPROM). Потом план можно забрать из робота через программатор на компьютер.

| | Рис.1. ROBER |
Технические характеристики:
Микроконтроллер: ATMega16 (DIP корпус, тактовая частота 16 МГц).
Пам'ять: 64 кб.
Индикация: символьный ЖКИ с развёрткой 2*8 символов (с подсветкой), светодиоды.
Связь с компьютером: 5-ти проводковый программатор STK200.
Связь с окружающей средой: ИК-локатор(бампер)(Рис.2) накрутящейся платформе (локация на 15 см.).
Контроллер(драйвер) двигателя: L293D.
Движущая часть: два електромотора на 3 вольта. Платформа с редуктором и амортизаторами.
Аксессуары: вставные гусеницы на колёса для улучщения сцепления с поверхностью.
Питание: 8 пальчиковых батареек типа АА на 1,2 вольт (4 на двигатель и 4 на схему).

| | Рис.2. ИК-локатор |
Результаты: Сначала, при включении, робот едет вперёд до первой встретившейся стены. Когда срабатывает ИК-локатор – это означает, что робот увидел стену. Когда он увидит стену, то ставит 1 в план и начинает ехать вправо вдоль стены, выставляя 1 или 0 в зависимости есть слева стена, или нет. В итоге, когда ROBER проедет вокруг всей комнаты, можно посмотреть на готовый план(Рис.3). Чтобы закачать план на компьютер я использовал программу PonyProg (нужно закачать содержимое EEPROM).
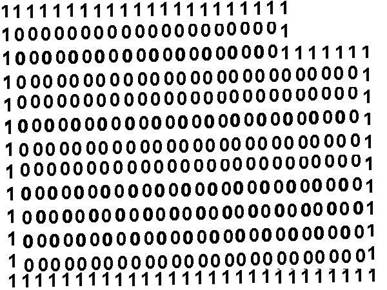
| | Рис.3. Пример отсканированного плана |
Цена: На этого робота у меня ушло денег:
1. Текстолит - 4,50грн. = 0,90$;
2. Микроконтроллер Atmel Mega 16(ATMega16) – 15,50грн. = 3$;
3. Гнездо для микроконтроллера на 28pin – 0,50грн. = 0,1$;
4. Кварцевый резонатор на 8 МГц – 2грн. = 0,4$;
5. Два конденсатора на 15-22 мкФ – 0,20*2грн. = 0,03*2;
6. Шлейф на пять проводков и разъем для программатора и провода на схему - 3грн. = 0,60$;
7. Батарейный отсек на четыре батарейки типа AA – 4грн. = 0,90$;
8. Светодиоды(в том числе и ИК) 4шт. – 1*4грн. = 0,8$;
9. Корпус – 14,50грн. = 3$;
10. Шлейф на 16 проводков – 0,50грн. = 0,1$;
11. Разъем для шлейфа на 16 выходов – 1грн. = 0,2$;
12. Шлейф на пять проводков и разъем для программатора - 1грн. = 0,20$;
13. Вход для разъема для шлейфа на 16 входов – 1грн. = 0,20$;
14. Символьный ЖКИ – 25грн. = 5$;
15. Платформа для робота – 20грн. = 4$;
16. Медная пластина для батарейного отсека – 5грн. = 1$;
17. Батарейный отсек на четыре батарейки типа AA с выключателем и крышкой - 5грн. = 1$;
18. Драйвер двигателя L293D – 10грн. = 2$;
19. Кнопка для подсветки – 3грн. = 0,60$;
20. Коннекторы и прочие мелочи – 10грн. = 2$;
ИТОГО: 129,90 гривны = 24,7$
|  Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
