31.08.2009, 15:56
Источник: PhysOrg.com
Детейлинг центр в Москве batman-ton.ru.

|
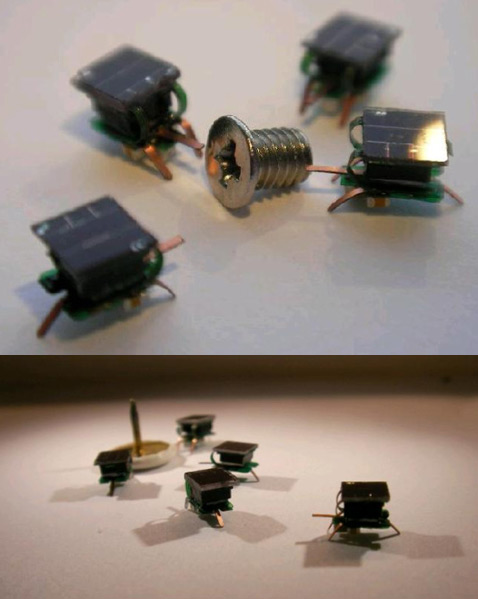
Создатели данного прототипа считают, что в будущем такие микророботы станут производиться дёшево и быстро, благодаря чему найдут применение чуть ли не где угодно (фото Edqvist, et al.). |
Пришло время миниатюрным роботам оставить исследовательские лаборатории и найти полезное применение в повседневной жизни. Так считают учёные из Швеции, Испании, Германии, Италии и Швейцарии, представившие новую опытную технологию массового производства трёхмерных роботов миллиметрового масштаба.
Учёные, покамест вручную, построили прототипы роботов размером 3,9 x 3,9 x 3,3 миллиметра, объёмом менее 23 мм3 и весом 65 миллиграммов. При этом столь крохотная машинка представляет собой микросистему с приводами, датчиками, системой управления энергоресурсами и кое-какой другой встроенной электроникой. Питается малыш от солнечной батареи и может передвигаться.
По большей части микроробот состоит из двусторонних гибких печатных плат, скреплённых с помощью токопроводящего клея, причём платы получаются сложенными вдвое. Ходит машина на трёх ногах за счёт их вибрации, а четвёртая конечность, горизонтально вытянутая вперёд, действует как тактильный датчик.
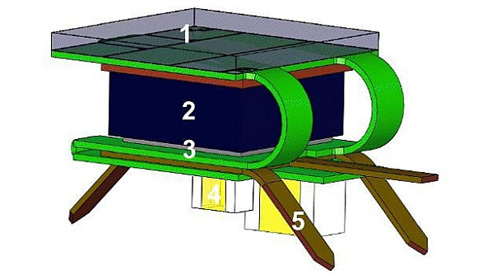
| | Схема микроробота. 1 – солнечная батарея, 2 – инфракрасный коммуникационный модуль, 3 – специализированная интегральная микросхема, 4 – конденсаторы, 5 – модуль, отвечающий за передвижение (иллюстрация Edqvist, et al.). |
Чтобы ходить, этому роботу достаточно 3 вольт, тогда как солнечная батарея в состоянии обеспечить машинку 3,6 V. И это далеко не предел: дальнейшие исследования обещают прогресс как в снижении энергопотребления, так и в наращивании КПД солнечной панельки.
Хотя изначально каждый робот является самостоятельной единицей, предусматривается возможность взаимодействия машинок между собой посредством инфракрасных датчиков: они смогут сбиваться в стаи для выполнения определённой задачи. Этот проект называется I-SWARM.
| | Целью I-SWARM является создание роя миллиметровых роботов-насекомых (фото Edqvist, et al.). |
Само собой, проблем пока немало. Не всё ладно и с "голыми" микросхемами, и с проводящим клеем, и солнечной батареей. Кроме того, необходима новая специализированная интегральная микросхема (ASIC) и так далее. Однако учёные уверены, что при должном финансировании все трудности удастся преодолеть.
Отчёт о проделанной работе содержится в статье в Journal of Micromechanics and Microengineering. Узнайте также о рекордном роботе-пылинке и о прототипе робота-блохи. (Видеоролик ниже несколько из другой оперы, но всё-таки по теме роя роботов.)
Смотрите видео про технологию массового производства миллиметровых роботов. Вот Вам и будущее уже сегодня!!!
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
