30.09.2008, 09:20
Автор: Владимир Романченко (sai@3dnews.ru)
Сегодня в традиционной воскресной рубрике "IT-байки" наших читателей ждёт отнюдь не рассказ о новых достижениях на ниве завтрашних нанотехнологий. И даже не байки о послезавтрашнем дне квантовой физики. И даже не сказка с поучительным концом, но всего лишь рассказ о новых автогонках, но каких! Полагаю, нашим читателям ещё памятны прошлогодние соревнования машин-роботов с призовым фондом $1 млн., которые на протяжении четырёх последних лет организовывало Агентство передовых оборонных исследовательских проектов США - DARPA (Defense Advanced Research Projects Agency).
Так вот, в отличие от традиционных гонок, проводившихся в пустыне, этом году заезд пройдёт в условиях, приближённых к городскому, не говоря уж о том, что призовой фонд 2007 года увеличен. Вполне возможно, соревнования DARPA Urban Challenge 2007 так и осталась бы не более чем темой для новостной заметки, если бы… автора этих строк своевременно не занесло в США и ему не удалось бы собственноручно прикоснуться к одному из претендентов на победу в гонках. А ведь с такой информацией, согласитесь, писать про гонки совсем другой резон.
Для начала – немного вводной информации. В начале августа руководство DARPA в лице директора агентства, доктора Тони Тесера (Tony Tether) официально объявило 36 команд, избранных для полуфинального заезда автономных роботизированных автомобилей в гонке Urban Challenge 2007. По результатам заезда Urban Challenge National Qualification Event (NQE), намеченного на 26-31 октября 2007 года, двадцатка лучших команд примет участие в финальном заезде Urban Challenge, который состоится 3 ноября. Призовой фонд в этом году составляет $2 млн. за первое место, $1 млн. за второе и $500 тысяч за третье.

Как видите, ставки выросли, но также неизмеримо усложнились условия заезда с 6-часовым лимитом времени. Если в заездах прошлых лет DARPA Grand Challenge автопробег беспилотных машин происходил на 131,6-мильной (211,7 км) трассе, проложенной по пустыне, то в этом году, как видно из изменившегося названия - DARPA Urban Challenge, для полуфинального и финального заездов выбраны условия, максимально приближённые к городским. Для этого руководством агентства DARPA, по согласованию с Пентагоном (подразделением которого оно и является), был выбран армейский тренировочный полигон, расположенный на бывшей авиабазе George Air Force Base в Викторвилле (Victorville), Калифорния, где подразделения армии США отрабатывают приёмы проведения операций в городских условиях.
По поводу того, что DARPA, затрачивая приличные средства на подготовку таких гонок, преследует, в первую очередь, вполне прикладные военные цели, можно даже не сомневаться. В пресс-релизе, посвящённому DARPA Urban Challenge, об этом говорится вполне недвусмысленно: "DARPA selected the location because its network of urban roads best simulate the type of terrain American forces operate in when deployed overseas".. То есть, "место проведения гонок с городским расположением дорожной сети максимально отображает тип местности, с которым приходится сталкиваться американским подразделениям при проведении военных операций вне США". Перспективная цель этого заезда также полностью соответствует задаче DARPA, поставленной перед агентством Конгрессом США, а именно, довести к 2015 году количество автономных машин без водителей до трети.
Роботизированные автомобили будут действовать в ситуации с элементами военной миссии, что дополнительно усложняет программу. Как в отборочном туре, так и в финальном заезде автомобили-роботы обязаны действовать исключительно автономно, без какого-либо человеческого вмешательства. Более того, при движении в заданном периметре автомобили обязаны соблюдать правила движения штата Калифорния, такие как маневры при слиянии потоков, движение по кольцевым транспортным развязкам с односторонним движением. Иными словами, как выразился доктор Тесер, "Автомобиль обязан вести себя так, как любой другой обладатель водительской лицензии штата Калифорния".
Напомню, что первый заезд автономных машин-роботов состоялся в рамках Grand Challenge in 2004. Тогда заезд по пересечённой пустынной местности с 10-часовым лимитом времени так и не смог выявить победителя, однако цель всё же была достигнута в гонках DARPA Grand Challenge 2005, когда до финиша добрались пять автомобилей, а машина Stanley команды Стэндфордского университета на базе усовершенствованного Volkswagen Toureg преодолела дистанцию за рекордные 8 часов 14 минут.
Вот, собственно говоря, и вся присказка. Дело в том, что на прошлой неделе, приехав в Сан-Франциско для участия в Intel Developer Forum Fall SF 2007, мне удалось лично "познакомиться" с представителями команды Stanford University, равно как "облазить" вдоль и поперёк автомобиль Stanley Junior, подготовленный к соревнованиям DARPA Urban Challenge образца 2007 года. Ради справедливости я всё же приведу полный список всех 36 полуфиналистов Urban Challenge 2007:
- Austin Robot Technology - Austin, Texas
- AvantGuardium - Bethesda, Maryland
- Axion Racing - Westlake Village, California
- Ben Franklin Racing Team - Philadelphia, Pennsylvania
- CarOLO - New York, New York
- Gator Nation - Gainesville, Florida
- Golem Group - Santa Monica, California
- Insight Racing - Cary, North Carolina
- Intelligent Vehicle Systems - Dearborn, Michigan
- MIT - Cambridge, Massachusetts
- Mojavaton - Grand Junction, Colorado
- Ody-Era - Kokomo, Indiana
- OSU-ACT - Columbus, Ohio
- Princeton University - Princeton, New Jersey
- SciAutonics/Auburn Engineering - Thousand Oaks, California
- Stanford Racing Team - Stanford, California
- Sting Racing - Atlanta, Georgia
- Tartan Racing - Pittsburgh, Pennsylvania
- Team AnnieWay - Palo Alto, California
- Team Autonomous Solutions - Petersboro, Utah
- Team Berlin - Houston, Texas
- Team CajunBot - Lafayette, Louisiana
- Team Caltech - Pasadena, California
- Team Case - Cleveland, Ohio
- Team Cornell - Ithaca, New York
- Team Cybernet - Ann Arbor, Michigan
- Team Gray - Metairie, Louisiana
- Team Jefferson - Crozet, Virginia
- Team Juggernaut - Sandy, Utah
- Team-LUX - Woodstock, Maryland
- Team Oshkosh Truck - Oshkosh, Wisconsin
- Team UCF - Orlando, Florida
- Team Urbanator - Littleton, Colorado
- University of Utah - Salt Lake City, Utah
- UU - Westminster, Maryland
- VictorTango - Blacksburg, Virginia
Отмечу, что в заезде будет принимать участие такая экзотика, как, например, самый настоящий грузовик Oshkosh Truck от команды Teledyne Scientific Company, г. Ошкош (Oshkosh), Висконсин. Потрясающая, кстати, концепция, различные видеоролики с этим грузовиком можете посмотреть здесь.
А я, с вашего позволения, расскажу именно о том, что видел и слышал своими глазами.
Stanford Junior
Начну рассказ с того, что команда Stanford Racing Team поддерживается рядом влиятельных спонсоров – таких как Intel, MDV-Mohr Davidow Ventures, Red Bull и Volkswagen of America, к которым в этом году добавились Applanix, Google и NXP Semiconductors. Плюс DARPA с финансовой поддержкой в размере $1 млн.
Благодаря тому, что компания Intel является спонсором Stanford Racing Team и появилась возможность познакомиться с этим удивительным автомобилем вблизи. Дело в том, что Junior был выставлен на втором этаже Moscone Center, где традиционно осенью проходит Intel Developer Forum, непосредственно перед входом в закрытую территорию для журналистов, рядом с экспозицией российского подразделения Intel. Фактически, Junior стал для меня, опоздавшего к началу на полтора дня, одним из первых крепких впечатлений IDF, именно его я увидел первым делом после прибытия из аэропорта Сан-Франциско. Впечатляет, знаете ли.

В отличие от Stanley – модифицированного Volkswagen Toureg с доработанными бамперами и дополнительной защитой днища, новое детище Stanford Racing Team, автомобиль Junior, выполнен на базе дизельного Volkswagen Passat образца 2006 года, тюнингованном в лаборатории Volkswagen of America Electronics Research Lab в Пало-Альто, Калифорния. При этом наиболее значимой доработке подверглась система управления, дроссельная система, а также тормоза – всё это теперь управляется с помощью компьютера. Не говоря уж о том, что весь автомобиль теперь просто напичкан самыми разнообразными датчиками и следящими системами.
Ключевое отличие Junior от предшественника Stanley заключается в том, что Junior воспринимает и реагирует на объекты, окружающие его со всех сторон, в том числе, быстро движущиеся, в то время как Stanley был способен воспринимать лишь неподвижные объекты и неровности рельефа, расположенные спереди.
Как и предшественник Stanley, Junior оборудован лазерной системой навигации, радаром и видеокамерой, а также серверной системой на процессорах Intel Core 2 Duo – вчетверо более мощной, чем применявшаяся в составе Stanley.
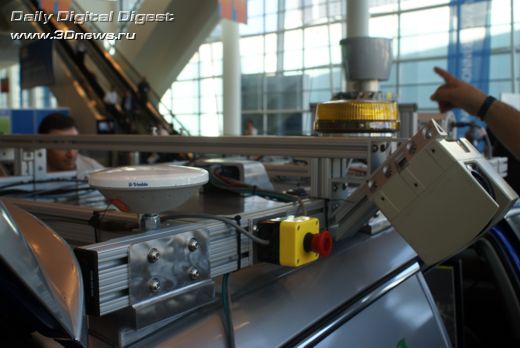
Правда, теперь массив лазерных датчиков для определения дистанции обеспечивает обзор местности на 360° в трёхмерном пространстве и главное - в реальном времени. Вот он, голубчик, вращается на самой "макушке" автомобиля.
Лазеры, применённые для навигации Stanley - это так называемые лидары (LIDAR, то есть, сокращение от light detecting and ranging) - лазерные локаторы инфракрасного диапазона, с частотой сканирования у главного массива до 15 раз в секунду. По словам представителей команды Стэнфордского университета, поток данных только главного кругового лидара превышает гигабит в секунду!
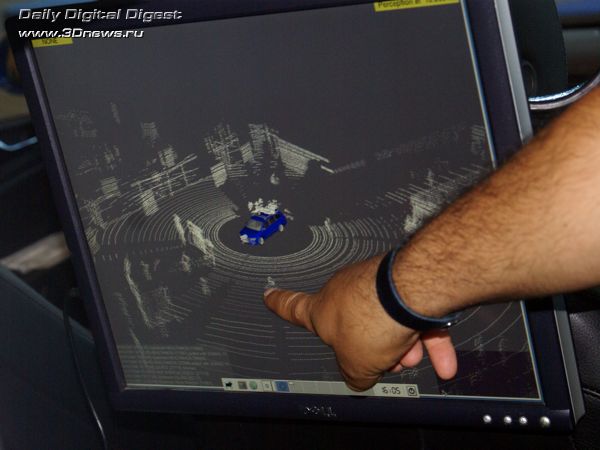
Можете себе представить, какова мощность установленных внутри серверов для обработки поступающих данных. Кстати, сомневающиеся в том, что лидар сканирует окружающее пространство в режиме real-time, могли убедиться в этом лично: стоя рядом с автомобилем и помахав рукой, можно было наблюдать соответствующую картинку на экране установленного на заднем сиденье монитора.
В комплексе с расстановленными "по периметру" машины шестью видеокамерами, лазерами на бамперах, радаром, GPS-приёмником и встроенной аппаратной системой навигации, Junior способен собирать исчерпывающие данные об окружающей среде и анализировать их. И, как выразился Майк Монтемерло (Mike Montemerlo), старший инженер-исследователь лаборатории Stanford Artificial Intelligence Lab (SAIL), выдавать "прогнозы", для того, чтобы в автомобиль-робот мог принимать самостоятельные решения о дальнейшем движении.
Однако наиболее мощным "оружием" автомобиля Junior, делающим его по-настоящему автономной системой, стоит назвать программное обеспечение, над которым работали студенты, преподаватели и инженеры SAIL. Самые разнообразные модули системы - распознавания, картографии, планирования и управления, позволяют назвать Junior машиной с возможностью самообучения и дальнейшего совершенствования "навыков", необходимых для самостоятельного "осмысления" и принятия решений в самых разных ситуациях.
В заключение рассказа – краткие спецификации автомобиля-робота Junior.
Конструкция
- Шасси: Volkswagen Passat, модель 2006 года
- Двигатель: 4-цилиндровый турбо-дизель
- Трансмиссия: 6-скоростная коробка передач
- Объём двигателя: 1968 сс
- Расход топлива: город – 9,2 л на 100 км, шоссе – 5,5 л на 100 км; комбинированный – 6,8 л на 100 км
- Мощность: 140 л.с. (103 кВт) при 4000 об/мин
- Максимальная скорость: 203 км/ч, разгон c 0 до 100 км/ч за 10,1 с
Сенсоры - многоступенчатая система датчиков в сочетании с интеллектуальным ПО, позволяющие автомобилю Junior определять местоположение и оценивать окружающую обстановку в дневных и ночных условиях, даже в неблагоприятных условиях для работы системы GPS.
Позиционирование и ориентация - лазерная система реального времени Applanix POS LV 420, интегрированная с несколькими 2-частотными GPS-приёмниками, модулем инерционной навигации, одометрическим оборудованием с датчиками на колёсах, спутниковым сервисом Omnistar Virtual Base Station. Точность определения местонахождения – около 50 см, или 1/50 градуса.
Установление местонахождения - ряд активных real-time сенсоров: лидар SICK, расположенный по обеим сторонам автомобиля, лидар RIEGL LMS-Q120, расположенный спереди. Точность позиционирования – до 5 см.
Система распознавания (перцепции) - лидар Velodyne HD, сканирование в круговой плоскости со скоростью 15 раз в секунду, сочетание 64 отдельных лазеров с миллионами 3D контрольных точек в радиусе 65 м. Дополнительные лидары – два IBEO ALASCA XT спереди машины и два SICK LD-LRS сзади, позволяют оценивать обстановку на расстоянии до 200 м.
Аппаратная платформа - стоечные серверные системы, оснащённые новейшими двух- и четырёхъядерными процессорами Intel Core2 Duo и Intel Core2 Quad, опрашивающие данные всех сенсоров Junior с частотой 200 раз в секунду и обрабатывающие все задания программной части искусственного интеллекта автомобиля. Кстати, инженеры Intel также приняли активное участие в написании ряда модулей программного обеспечения Junior.
Послесловие. Чуток грустное
Это был мой первый Intel Developer Forum в Сан-Франциско, и, честно говоря, я переполнен количеством информации, свалившейся на мою голову всего лишь за три дня. Рассказ об автомобиле-роботе Junior – это только малая толика из всех событий Форума, лишь слегка "профильная", а сколько там довелось увидеть действительно необычного и революционного в плане компьютерных идей! Надеюсь, в ближайшее время у меня всё же хватит сил и времени рассказать вам о самом интересном.
Другое дело – автомобили. Скажу честно – я их недолюбливаю, особенно те, которые быстро ездят и, соответственно, много давят, плюс, адски воняют выхлопами. По-другому это называется "терпеть необходимое зло", потому что на моём любимом велосипеде да с такой профессией далеко не уедешь, не те времена.
Да речь не об этом. Собственно, это к тому, что интересуюсь автомобильной тематикой лишь в той мере, в которой она касается моей работы, но отнюдь не в свободное время. И, надо же, буквально за сутки до написания этой статьи мне на глаза попался научно-популярный журнал, в котором очень увлекательно была описана история гоночных автомобилей ХАДИ – это, кто помнит, болиды, разрабатывавшиеся в советские времена в стенах Харьковского автомобильно-дорожного института. Надеюсь, вы понимаете, насколько должна была быть интересной заметка, чтобы её до конца прочёл человек, совершенно не интересующийся автомобилями.
Это никакой не "рояль в кустах", я действительно давеча прочёл всё до конца и… расстроился. Я и не знал, что последний из этих болидов, ХАДИ-9, даже не добрался до скоростных замеров по причине… полного отсутствия подходящих трасс и совершенного отсутствия интереса в Советском Союзе к таким проектам.
Вот. Дописав до конца материал про предстоящие гонки DARPA Urban Challenge 2007 и характеристики автомобильного робота Junior, я вдруг вспомнил про судьбу ХАДИ-9. Связи, конечно, почти никакой, но действительно стало интересно, делается ли что-то интересное в этом плане на просторах СНГ в наше время? Тюнинг, бортовые компьютеры, аудио/видео системы, всевозможные картинги и "Формулы" – это понятно. Но делается ли что-нибудь уникальное, способное удивить рекордами весь мир? Это у меня лыжи не едут, потому что не в курсе темы, или действительно всё так плохо? Было бы замечательно, если бы я ошибался по незнанию!
И всё же, про автомобили-роботы, думаю, спрашивать бесполезно. Так что буду ждать предстоящий полуфинал и финал гонок DARPA Urban Challenge 2007. И теперь точно знаю, за кого буду болеть!
При написании статьи, кроме собственных фотоснимков, использовались информация и фото следующих источников:
- www.darpa.mil
- cs.stanford.edu
- www.stanfordracing.org
- www.intel.com
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте