 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
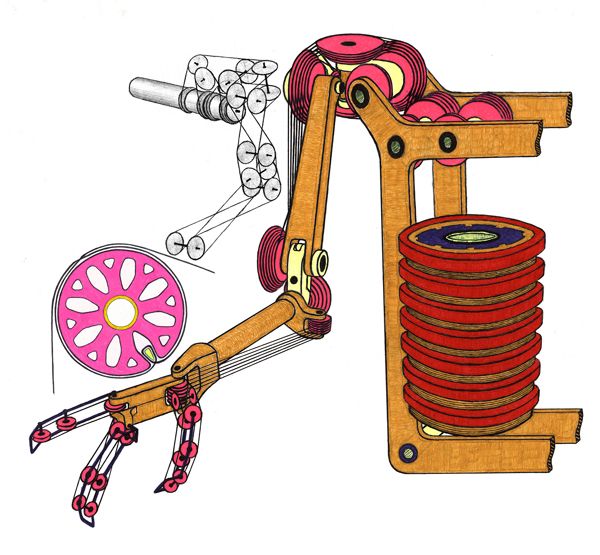 Робот - солдат "Айзек". Проект.1) Силовые структуры, шахтер, реклама, развлечения, испытатель техники, встреча с семьей через интернет для командировочных, вредные, опасные производства, исследования вулканов, планет, работа в любой точке мира не выходя из дома, роботизированная интернет-дискотека, кино, игрушки-куклы с интернет-управлением, вместо подъемного крана большой робот, спорт. 2) Человек дома, в управляющем костюме в карданном подвесе управляет по спутнику (интернету) роботом на другом конце планеты. На 2-х дисплеях шлема стереоизображение от 2 из 6 гиростабилизируемых телекамер с фокусировкой от ультразвуковых датчиков положения нижней челюсти. Поворот головы вправо-влево, вверх-вниз = поворот взгляда робота от ультразвуковых датчиков шлема. Голова робота - 6 неподвижных телекамер с защитой от лазера + 6 ночного видения. Гиростабилизация изображения с чисто электронными поворотами взгляда (объект патентования). Сжатие цифрового сигнала с корректировкой искажений. Взаимонезависимый поворот линий взгляда по программе или частичное перекрытие. Переключение телекамер незаметно за счет электронного согласованного движения обоих линий взгляда (объект патентования). 3) Датчики углов рук, ног, 3 угла наклона туловища робота от вертикали, компаса только ограничивают углы человека пока сила, действующая на робота, не превысит силу человека по масштабу. Тогда робот управляет человеком. Алгоритм "скорость точность" по ускорению, силе человека управляет разностью углов робота, человека. > ускорение, сила человека, > разность углов, быстрота робота. < разность углов - точнее, медленнее робот (сапер). Тензодатчики силы. 4) Туловище робота - 3 датчика ускорения, углового ускорения (гироскоп телекамер) от вертикали, компаса. Датчики человеку со стороны силы вибрацию "короткий сильный толчок - длительное возвращающее движение". 5) Кисть 3 пальца, 300 упругих углеродно-резисторных полупроводниковых пропорциональных саперных датчиков давления температуры. Перчатка человека - 300 электродов переменного тока. Сапер не двигается - вся связь датчикам. За доплату на кисти: гамма-излучатель (поиск взрывчатки по пропорции ответного излучения азота, углерода), телекамера, датчики радиации. 6) 3 оси (противовесы с электроприводом (балансировка)) кардана костюма от центра масс человека. 7) Газотурбинный двигатель крутит с постоянной скоростью и охлаждает воздухозаборником барабан механизма привода, который управляет 28 (последняя версия многодисковая по типу мотоциклетного сцепления - объект патентования) тросами руками, ногами робота через управляемое электромагнитами трение с барабаном 28 кулачковых колец через ролики тросов (большое передаточное число (объект патентования)). Тросы уравновешенны (объект патентования) другими тросами. Групповой привод тросов = вся мощность двигателя на 1 движение (быстрота, мощные удары руками, ногами, поднятие тяжестей). 8) В спине костюма тоже так, с током на электропривод от вращающихся трансформаторов. Привод можно заменить электродами на мышцы в костюме. Инерция привода мала - робот бежит со сверхлегкой броней (объект патентования) 2 раза быстрее человека (длина шага, мощность). 9) При задержке сигнала - компьютерная двойная обратная связь: углы рук, ног робота - пропорционально управляющей силе на костюме, а ее скорость возрастания - скорость рук, ног. 10) Корректировка задержки сигнала (<0.4 сек) по задержке, центру масс, последним 2 шагам. 11) Управление масштабом силы обратной связи: выносливость (бег), чувствительность (сапёр). 12) Дисплей - 1 из дисплеев шлема (переключение). Мышь - двухкоординатная кнопка-чашка. 13) Громкоговоритель на модуляции выхлопа двигателя с коррекционными предъискажениями (молчание - электронный глушитель). 14) Самодиагностика с алгоритмами сверхживучести. 15) Алгоритм распознавания стереоизображения с определением расстояния по синусно-косинусным уравнениям. 16) Ультразвуковые или радиовысотомеры на ступнях. 17) Бег без человека: толчок стопой при беге робота - управление компьютером углами "центр масс - левая стопа - продольный угол бега", "центр масс - правая стопа - продольный угол бега" по формуле: тангенс продольного угла бега = отношению продольного ускорения бега к сумме ускорения свободного падения и вертикального ускорения (датчики + гироскоп) центра масс робота. 18) Компьютер управляет поперечным углом бега по принципу уравнивания импульса силы толчка на обеих стопах + гироскоп. 19) При беге на повороте< угол колена начала толчка внутренней по радиусу ноги по формуле: тангенс поперечного угла бега = отношению центростремительного ускорения центра масс по радиусу к сумме ускорения свободного падения и вертикального ускорения центра масс робота. Поперечный угол бега - угол между вертикалью и проекцией на поперечную вертикальную плоскость бега от центра масс линии "центр масс - точка опоры (стопа)". 20) Продольный угол бега - угол между вертикалью и проекцией на продольную вертикальную плоскость бега линии "центр масс - точка опоры". 21) Импульс силы стопы = сумме импульсов силы 2 передних и 1 заднего датчиков импульса силы стопы. Импульс силы = произведению средней (конденсаторная схема) силы на время. 22) Приземление стопы - это приседание с управлением компьютером углами "центр масс - левая стопа - продольный угол бега", "центр масс - правая стопа - продольный угол бега" по формуле: тангенс продольного угла бега = отношению продольного тормозного ускорения робота к сумме ускорения свободного падения и вертикального ускорения центра масс робота. 23) Приземление стопы в повороте - управление компьютером поперечным углом бега по формуле: тангенс поперечного угла бега = отношению центростремительного ускорения центра масс по радиусу к сумме ускорения свободного падения и вертикального ускорения центра масс. 24) Толчок, приземление - вертикальный (от центра масс) момент компенсируется: > частота шага, разнос рук вперед-назад, < угол колена начала толчка, < шаг. 25) Вычисление общего центра масс в беге. Алгоритм нахождения по цифровой карте местности парашютного контейнера с топливом, боеприпасами, запчастями (ремонтирует себя, другого робота). Универсальные алгоритмы обработки информации со сражением без управления человеком двух армий роботов. 26) Интеллект = логика + память. Логика- способность создать полезную информацию, которой нет в памяти, датчиках - алгоритмы обработки информации. Универсальные эталоны логики. Баланс: логика-память по затратам элементов мозга изменяется в пользу логики (>). Аналогичный процесс в развитии жизни - господство логики человека над всеми формами жизни. Системы "датчики - мозг - исполнительные элементы" - единые законы развития. < лишних действий, затрат ресурсов, технических функций - сильнее логика. Технические функции - функции обслуживания средств достижения цели товара. Человек получил превосходство над шимпанзе от того, что у него на 2 хромосомы ( 2 буквы ) < (46, 48). < технических функций генетической программы при = количество мегабит в генетических программах дает > потребительских функций (цель). Чем < букв в азбуке (морзе 2 буквы) тем < бит на букву, быстрее передается текст по интернету. 27) "Айзек- 2" - пожарный, не боится радиации, вакуума, температур 70 - 2200 К, газовые двигатели от твердотопливного газогенератора, углерод-углеродные композиты, керамика, вольфрамо-рениево-танталовых сплавы, пневмоника, высокотемпературные полупроводники типа нитрида бора, твердые электролиты, твердая смазка, термоэлектрические элементы. 28) Температура мозга - частично перекрывающиеся зоны. При >температура - мозг 1 зоны переписывает память в мозг 2 зоны. Передав функции, получив ответ, выключается. Затем между 2 и 3 зоной... 29) Выхлоп + вода = огнетушитель. 30) Военно-экологическая философия звездных войн: искусственный интеллект, сверхживучесть, минимум расходных материалов в товарах и для децентрализованной (защита от авиации, ракет) до мелких мастерских промышленности. Отказ от производительности промышленности в пользу сверхживучести товара. 31) Общественная потребность - через > экологические налоги за < сертификационный ресурс товара по каждой из стандартных функции товара. Апелляция - суд взаимно несообщающихся экологических экспертов. 32) Философия сверхживучести - децентрализация мозга, других систем. При нет ответа на датчики центральным компьютером (поврежден снарядом) его по алгоритму выборов заменяет компьютер, сохранивший связь с > датчиков, исполнительных элементов. 33) Южная философия сверхживучести: дублирование функции несколькими системами на разных физических принципах, интеллектуальные системы с датчиками, восстанавливающие потерянную от повреждения (снарядом...), износа функцию другими исполнительными элементами, датчиками. 34) Северная философия сверхживучести: минимум дублирования, искусственного интеллекта, датчиков, простые элементы с сверхнизкой вероятностью отказа, дорогие предпродажные испытания и материалы. Элементы товара не изолируются от температуры, давления, влажности, радиации, температурных скачков:. Простота, дешевизна эксплуатации. 35) Южная - быстрота разработки, < технический риск, > доходы производителя. 36) Северная философия сверхживучести - успешный запуск в 80-х годах с подводной лодки с глубины 400 метров межконтинентальных ракет, не изолируемых при хранении от воды, её давления. 37) > ресурс, живучесть, равнопрочность, безопасность товаров, - это < городские, промышленные свалки, < мировая промышленность, - главный потребитель грузоперевозок, строительства, энергопотребления, ресурсопотребления, пассажироперевозок (на работу, командировки, перемещения внутри предприятия...). 38) Более массовый товар, жестче экологическая сертификация ресурса. Для мелкосерийных, дорогих автомобилей, других товаров экологические налоги <, т.к. этот сектор рынка вводит новые технологии, определяет реакцию потребителя на новые функции (многофункциональность технологии - важно для военных). 39) Развитие конструкции автомобиля - экоформула. Правила от военных и экологических организаций, военные и экологические требования совпадают. А1)На массу ограничений нет. А2) Прочность подвески, колес, подшипников, кузова регламентирована. Проверяется на стенде. А3) Ограничение скорости через ограничение веса, стоимости топлива, нет дозаправки. А4) Стоимость заправки новым топливом от средней оценки, взаимно несообщающимися (слабый эксперт сам вынесет себе приговор) экспертами, стоимости топлива при его промышленном производстве. А5) Взрывобезопасный топливный бак с наддувом выхлопными газами (< 350 К), от системы дожигания кислорода. А6) Запрещено токсичное или дающее токсичный выхлоп топливо. А7) Ограничения на токсичные материалы. А8) Запрещена жидкая смазка. Только твердая 70-670 К, работающая в вакууме. А9) Развитие на ресурс, равнопрочность, живучесть, безопасность гонка не < 24 часов. <9 часов на гонщика. А10) Обслуживание, замена колес только гонщиком запчастями в его машине. А11) Регулируемое антикрыло может действовать на упругий элемент подвески, через механизм кузова, с системой гашения колебаний "антикрыло - кузов" (<0.4Hz , ограничение амплитуды). А12) Безопасность: колеса закрыты с боков. А13) 2 боковые телекамеры заднего вида с дисплеями для гонщика А14) Судейский радиоканал. А15) Радиосвязь с командой, односторонняя телеметрия. 40) Увеличение ресурса, равнопрочности, живучести, безопасности автомобиля повышает уровень жизни по автомобилю и процент дорогих автомобилей на рынке. Уменьшает долю стоимости страхования от стоимости автомобиля. Все это относится к другим товарам, экономике государства. 41) Автор за счет изобретенных им приемов имел 1 место по борьбе на соревнованиях большой школы единоборств. Занимается карате. Опыт конструирования приемов, применения физики намерен вложить в физико-математическиие алгоритмы для компьютерной программы рукопашного боя роботов-солдат. Чемпионат мира по рукопашному бою роботов-солдат. Правила: R1) Категории по снаряжённому весу R2) Вес топлива, стоимость заправки ограничены. Дозаправки нет. R3) Стоимость заправки новым топливом от средней оценки, взаимно несообщающихся экспертов, стоимости топлива при его промышленном производстве. R4)Взрывобезопасный топливный бак с наддувом выхлопными газами (< 350 К) от системы дожигания кислорода. R5) Запрещены токсичные или с токсичным выхлопом топлива. R6) Ограничения на токсичные материалы. R7) Запрещена жидкая смазка, только твердая смазка 70-670 К, работающая в вакууме. R8) Запрещены материалы конструкции, быстро испаряющиеся в вакууме при работе робота в звездных войнах с баком окислителя R9) Нет обслуживания на ринге. R10) Защита от электромагнитной бомбы, радиации (цифры). R11) Регулировка на ринге через телеметрию разрешено только 1 человеку полностью управляющего роботом. Чемпионат мира по рукопашному бою компьютером управляемых (искусственный интеллект) роботов - солдат: R11) телеметрия односторонняя. Регулировка от телеметрии, внешний компьютер, ввод программы на ринге запрещены. 42) Рисунки автора. Автор имеет 600 незапатентованных и 5 запатентованных изобретений (патенты на изобретения: № 2159501 - электронный следящий привод, № 2168640 - двигателя охлаждение от воздушного цикла Брайтона, № 2170372 - композитный шатун двигателя № 2171184 - активный стабилизатор поперечной устойчивости автомобиля; № 2263814 - турбина). Могу делать до 7 изобретений в день. Я математик, изобрел системы координат (координата одной цифрой) по принципу минимума вычислений. Намерен взять патент на сверхбыструю (минимум вычислений) компьютерную графику. Я химик (химические изобретения), универсальный технический физик. Могу решать быстро физико-технические, инженерные проблемы, которые никто не смог решить (есть примеры). Я универсальный конструктор-изобретатель. Продаю мозги. Чемпион мира по конструированию (выиграю сборную мира), изобретательству, технической физике, искусственному интеллекту, многофункциональной электронике. Здоров, вынослив, холост, ищу рабочее место конструктора-изобретателя. 43) Есть незапатетнтованные изобретения поддерживающие КПД газотурбинного двигателя на частичной нагрузке за счет дросселирования впуска и выпуска. Решил проблему роликоподшипников для газотурбинного двигателя с нерезонирующими упругими высокоресурсными тонкостенными трубчатыми роликами. Есть новые, по физике, системы охлаждения, турбины, компрессоры, управление вектором тяги, бесколлекторный униполярный двигатель Фарадея на любое напряжение, способы длительного удержания плазмы в термоядерном реакторе, способы удешевления на 30% пилотируемых полётов на Луну, Марс и т.д. 44) Многофункциональная система цифрового телевидения высокой четкости с < 7 раз скоростью передачи информации и ее объема на носителе записи. 45) Компьютер с регулируемой (число, пропорция) параллельностью обработки информации. Одновременная подача тактовых импульсов на все параллельные каналы от многоступенчатого, управляемого программой, коммутатора. Транзисторы могут работать от программы и как память и как процессор. Повторяющийся рисунок схемы компьютера. Быстрый сумматор (< транзисторов). Возможность создания компактной программы - зародыша с самостоятельно быстрорастущим, за счет транзисторов, интеллектом. 46) Конденсаторные микропроцессор, микроэлектроника (объекты патентования). Мало нагреваются - многоэтажная архитектура. Мозг ровота-сверхживучие конденсаторные(из трехэлектродных конденсаторов, средний электрод-управляюший) микропроцессоры. Которые не боятся градиента повышенной плотности электронов после высотного термоядерного взрыва. Не боятся температур 0-2000К, радиации, бактерий, ускорений пушечного снаряда, мало нагреваются, экономичнее транзисторных микропроцессоров в 10 раз. Не боятся электромагнитных бомб, т.к. в схеме автора (объект патентования) нет замкнутых электрических цепей, напряжение питания > 3000V.Cхема конденсаторного микропроцессора состоит из повторяюшихся рисунков.Управляюшие структуры типа дерево-в программе.У автора есть алгоритмы организуюшие оптимальное число и пропорции взаимно независимых (защита от сбоев) и одновременно работаюших паралельных (скорость) каналов с разными пртнципами (формулами) работы. При паралельной равоте сначала обработка самого быстрого канала, затем корректировка по самому значимому каналу. Повтор после сбоя с корректировкой после повторного сбоя. Для зашиты от сбоя-децентрализация работы функциональных элементов программы. На все это нужен инвестор для патентования на его условиях. Нужна экспериментальная база. 47) На крыши зданий робот АЙЗЕК запрыгивает с помошью телескопического шеста(раздвигается газом при горении твердого топлива) с твердотопливной ракетой с 2 косо направленными управляемыми соплами наверху шеста. 48) Под водой турбина робота АЙЗЕК работает без демаскируюших газов на воде, натрии и перекиси водорода(есть более дешевые варианты). 49) Можно подсоединить к роботу ультразвуковой излучатель(отраженный сигнал на уши робота), 2 электровинта(электроэнергия от турбогенератора) и топливные баки-обтекатели для подводной скорости робота как у торпеды. 50) Возможно энергопитание робота АЙЗЕК на ядерно-изомерных(обмен протонами, нейтронами между коаксиально расположенными протон-нейтронными оболочками ядра атома) переходах: А1)изомер гафний 178 +рентгеновские лучи +фотоядерная реакция, А2)водный раствор трехокиси изомера ксенон 133m может дать от изомерного перехода 232 килоэлектронвольт+81 килоэлектронвольт от бета-распада на каждый атом ксенона. 51) Чтобы человек выдержал конкуренцию с новой, более совершенной, формой разумной жизни - роботами, необходимо генной инженерией: А1) уменьшить число химических элементов в организме человека, А2) обеспечить возможность широкой замены одних химических элементов другими , А3) упростить конструкцию человека: 3 пальца на кисти, 6 ребер, 8 позвонков, убрать пальцы на ногах, число мышц уменьшить с 600 до 30; А4) для выживаемости в условиях голода и холода и упрощения ремонта заменить волосы тонкой жировой прослойкой, А5) заменить пищу способностью усваивать простую органику типа нетепродуктов, А6) увеличить процент неорганических материалов в организме человека для выживаемости (звездные войны) в условиях радиации, злых бактерий, вирусов, для спасения от демаскирующего запаха постоянно разлагающейся органики, А7) избавление от жидкостей в организме. В идеале - выживаемость на уровне роботов, чтобы они уважали и не считали дохлым слизняком. 52) В будущем на Луне будут войны между армиями сверхдержав. Луна - будущая база галактических крейсеров (расходные материалы, ремонт). С Луны будут уходить к звездам, для колонизации, корабли с роботами вместо людей. На Луне будут создаваться технологии галактических крейсеров со скоростью в 30 - 40 раз > скорости света (смотреть: формулу Оливера Хевисайда E=mc 2 и его формулу электрона с сверхсветовой скоростью в вакууме; движение в вакууме за счет несимметричных (крутой передний фронт импульса, пологий задний фронт, или наоборот) электромагнитных импульсов (тяга > массы генератора в 10 раз (смотреть: магнитная штамповка))" обмен электромагнитной энергией между галактическим крейсером и станцией торможения (разгона)). Робот АЙЗЕК будет работать от многотопливного газотурбинного электрогенератора с турбиной изображенной здесь. Растягивающие
усилия на лопатках турбины заменены на сжимающие. Это позволяет использовать для
лопаток хрупкую высокотемпературную керамику с 3500 Робот АЙЗЕК не требует регулировок после быстрой сборки. Каждый трос имеет независимый от других тросов привод с выборной(точность - экономичность) системой постоянного натяжения троса с возвращением в начальное положение при нет нагрузки. Тросы разделены на отрезки с быстросъемными (без инструмента) пружинными замками. Если пуля повредит трос, другие роботы или он сам заменят отрезок троса. Робот АЙЗЕК и его
датчики покрыты кевларовой тканью с водонепроницаемым, огнеупорным (длительно
670 Этот привод за 0,1секунду создает и убирает на тросе усилие в сотни тонн.
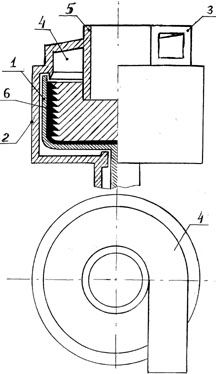
Макивара. Измеряет силу удара независимо от направления
и высоты удара. На рисунке: 1, 3, 4 - двухосевые акселерометры; 2 - пористый
упругий материал; 5 - жесткая труба; 6 - упругий материал. Принцип измерения: 2
Закон Ньютона. Используются 3 двухосевых акселерометра, закрепленные на равных
расстояниях и углах от центра масс жесткой овальной трубы - 5 с упругим
покрытием. Сила удара: F = 0,33 m
Цифровая магнитная головка записи - воспроизведения для магнитофонов, видеомагнитофонов, магнитных дисков компьютеров. Емкость записи 2 раза > за счет записи вместо одного 2 каналов с взаимно-перпендикулярными линиями намагничивания, по 450 в обе стороны от линии движения головки. 1 - зазор записи - воспроизведения. 2 - зазор размагничивающий головку. 1 канал - обмотки контакты 1 А. 2 канал - 1 В. Будет записывать 3 раза > чем обычная головка, если вместо двоичного - двухканальный троичный код. Есть еще способы (объекты патентования).2170372
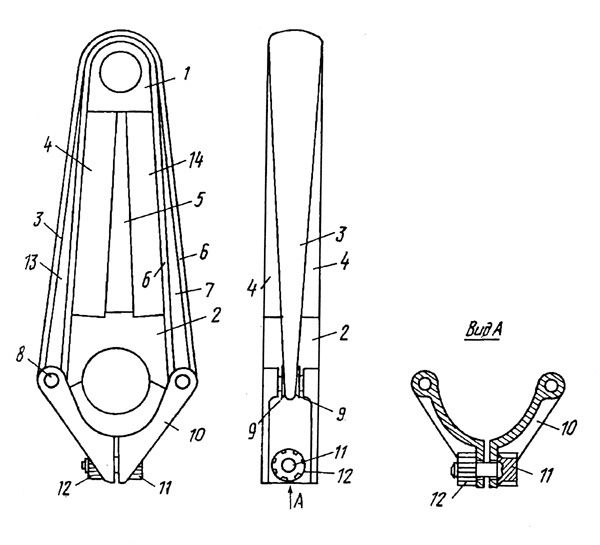
Шатун ДВС, содержащий основной стержень с РКГ и НГ, крышку на РКГ, с ней соединенную, шатун снабжен дополнительным стержнем и прокладкой, расположенной между основным и дополнительным стержнями, а также четырьмя растяжками, перекинутыми через НГ и закрепленными на катушках, между каждой парой этих растяжек расположены прокладки, при этом крышка выполнена разъемной и установлена на пальцах с запрессованными катушками. Шатун содержит основной 4 и дополнительный 14 стержни прямоугольного сечения, НГ 1 и РКГ 2, разъемную крышку 10, скрепляемую болтом 11 и гайкой 12, установленную на пальцах 8 с запрессованными катушками 9, четыре растяжки 3 и 6, перекинутые через НГ 1 и закрепленные на катушках 9. Между основным 4 и дополнительным 14 стержнями расположена первая прокладка 5 из пенопласта, а между растяжками 3 и 6 - вторая и третья прокладки 13 и 7 из пенопласта. НГ 1 и РКГ 2 могут быть выполнены из композита с матрицей из магнийлитиевого сплава или алюминийлитиевого сплава с плазменным напылением поверхности трения, оба стержня 4 и 14 - из бороволокнита, пальцы 8, катушки 9, крышка 10, болт 11, гайка 12 с шлицами - из титанового сплава, растяжки 3 и 6 - из эпоксидного волокнита с арамидными волокнами (кевлар). НГ 1, верхние части стержней 4 и 14, РКГ 2, первая прокладка 5, растяжки 3 и 6, вторая и третья прокладки 13 и 7 склеены, например, эпоксидным клеем. Изготовление и сборка шатуна осуществляются следующим образом. К первой прокладке 5 эпоксидной смолой приклеиваются оба стержня 4 и 14. Затем сверху этой сборки приклеиваются НГ 1, а снизу - РКГ 2. Прокладки 7 и 13 формируются на оправке из двух технологических стержней (не показаны), на которые насажены две катушки 9. Нить из эпоксидного волокнита, пропитанная эпоксидной смолой, наматывается таким образом, что на одной катушке 9 нить располагается по часовой стрелке, а на другой катушке 9 - против часовой. Далее обе катушки 9 снимаются с технологических стержней и вставляются между отверстиями крышки 10 под пальцы 8, после чего в катушки 9 запрессовывают оба пальца 8. Затем растяжки 3 и 6 закрепляются на НГ 1 эпоксидным клеем. Обе части крышки 10 стягиваются болтом 11 до отверждения смолы на растяжках 3 и 6 для создания предварительно напряженной конструкции. При технологическом стягивании крышки 10 болтом 11 в отверстие РКГ 2 вставляется стержень (не показан). Это стягивание выполняется при предварительном отверждении смолы в неразъемной полу сборке шатуна, включающей в себя РКГ 2 и НГ 1, оба стержня 4 и 14, первую прокладку 5. После сжатия обеих частей крышки 10 болтом 11 в щель неотвержденных растяжек 3 и 6 вставляются прокладки 7 и 13, которые приклеиваются эпоксидной смолой к ним. Узкие части щели между прокладками 7 и 13 заполняются эпоксидной смолой с корот-коволоконным наполнителем. НГ 1 и РКГ 2 приклеены к стержням 4 и 14. Сверхживучая (звездные войны, 1 спутник вместо 3)
|
Хотите видеть на нашем сайте больше статей? Кликните Поделиться в социальных сетях! Спасибо!
Обратите внимание полезная информация.