 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
Роса - робот, способный к адаптации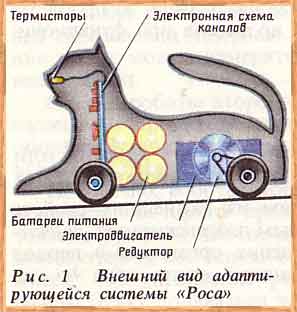 Одним из важнейших свойств живого организма, необходимым для выживания, является адаптация. Изучение поведения организма в период его приспособления к окружающей среде - одна из основных задач кибернетики.
Одним из важнейших свойств живого организма, необходимым для выживания, является адаптация. Изучение поведения организма в период его приспособления к окружающей среде - одна из основных задач кибернетики.
Адаптивной называется система, которая может приспособиться к изменению внешних и внутренних условий. В качестве примера может служить организм человека или животного. Вспомните, как он реагирует на изменение температуры окружающей среды, мобилизуя все внутренние защитные силы, чтобы температура тела не опускалась ниже критической точки. Организм приспосабливается к среде, в которой обитает. В период адаптации (а это время может длиться в одном случае секунды, в другом-месяцы) работает весь сложнейший управляющий комплекс организма, миллионы нервных клеток, тысячи мышц. Создать такую систему искусственным путем пока еще не представляется возможным, поэтому ученые «отрабатывают» ее части, адаптирующиеся к свету, звуку, теплу и т.д. Простейшую из таких систем построили во Владимирском педагогическом институте А. Е. Пальтов, С. А. Муханов, В. И. Швецов. Свое устройство они назвали «Роса»-робот, способный к адаптации. Такой же робот с несколько усовершенствованной схемой был сконструирован юными техниками г. Свердловска. Его поведение напоминает поведение кошки, греющейся у камина (рис. 1). Как известно, кошка-теплолюбивое животное, как и наш робот, который, однако, «не хочет» обжигаться и «выбирает» наиболее оптимальное для себя расстояние от источника тепла, отодвигаясь от него, если жарко, и приближаясь, когда холодно. Мы предлагаем читателю самому изготовить устройство «Роса». Робот состоит из двух простых усилителей, образующих каналы А и Б, на входах которых включены датчики, чувствительные к температуре (рис. 2). Датчиком температуры служит термистор, включенный в мостовую схему. Напряжение, полученное на ее выходе, усиливается двухкаскадным усилителем, на выходе которого включено электромагнитное реле К1. Контакты реле управляют работой электродвигателя М1, приводящего робот в движение. Двухканальная система настраивается таким образом, что реле канала А срабатывает при более низкой температуре, чем реле канала Б. Датчики крепятся на поверхности, находящейся на одной плоскости. В качестве источника тепла могут быть использованы, например, камин или рефлектор, применяющиеся для обогревания комнаты. Рефлектор устанавливается перед роботом на расстоянии, равном примерно 0,5 м. Пока термисторы еще не нагрелись, реле не сработали, «Роса» начинает двигаться к источнику тепла. 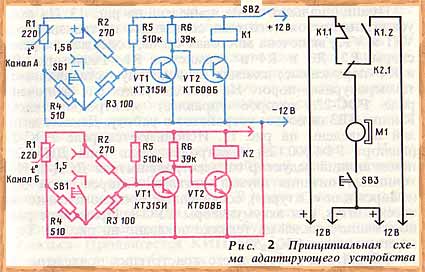 По мере его приближения срабатывает реле первого канала, которое своими контактами отключает электродвигатель от источника тепла. Робот останавливается-он нашел для себя оптимальные температурные условия. Попробуем увеличить тепловое излучение, приблизив рефлектор к роботу и создав ему таким образом неблагоприятную обстановку. Нагревается термистор, срабатывает реле второго канала, и робот отъезжает от рефлектора. Происходит реверс (изменение вращения) электродвигателя; движение будет продолжаться до тех пор, пока термистор второго канала не охладится и усилитель канала Б не выключит электродвигатель. Робот опять находит для себя комфортные условия. Перемещая рефлектор (изменяя температуру окружающей среды), можно наблюдать, как «Роса», подобно живой кошке, приспосабливается к изменяющейся ситуации. Принципиальная схема приведена на рис. 2. На вход усилителя постоянного тока, состоящего из транзисторов VTI и VT2, включена мостовая схема, содержащая резисторы R2, R3 и R4 и термистор RI. Резисторы R3 и R4-переменные; изменяя их величину, устанавливают температурный порог. На выходе усилителя включено реле РЭС-22, которое управляет электродвигателем. Кнопка SB3 включает устройство в работу. Данные деталей приведены на рис. 13. Используются реле РЭС-22 (паспорт РФ4.500.129); электродвигатель типа ДПМ-20, понижающий редуктор от электродвигателя ДСД-2. Источником питания служат круглые батареи типа 373 («Марс» или «Сатурн»), соединенные последовательно по восемь штук, или аккумуляторы СУС-З. Примерное расположение деталей на тележке показано на рис. 1. Термисторы-типа ТК-2-50. Общий вид робота и его конструкция приведены на рис. 2. Внешне робот можно выполнить по-разному, изготовив его корпус из фанеры, пластика или из ворсистой ткани, применяемой в производстве мягких игрушек. Каждый конструктор сможет сам выбрать наиболее понравившийся ему вариант. по книге "Математическая смекалка", автор Б.А. Кордемский |
Хотите видеть на нашем сайте больше статей? Кликните Поделиться в социальных сетях! Спасибо!
Обратите внимание полезная информация.
Робототехника для каждого 20 лет с Вами. 2026 г.