| Трёхколёсный бот |
Версия лего миндсормс nxt 2.0 (версия 8647)
Сложность строительства  ,
программирования: ,
программирования: 
|
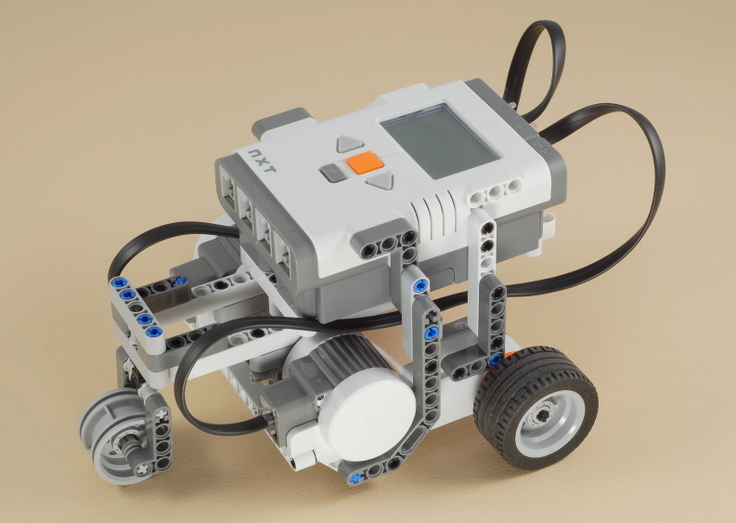
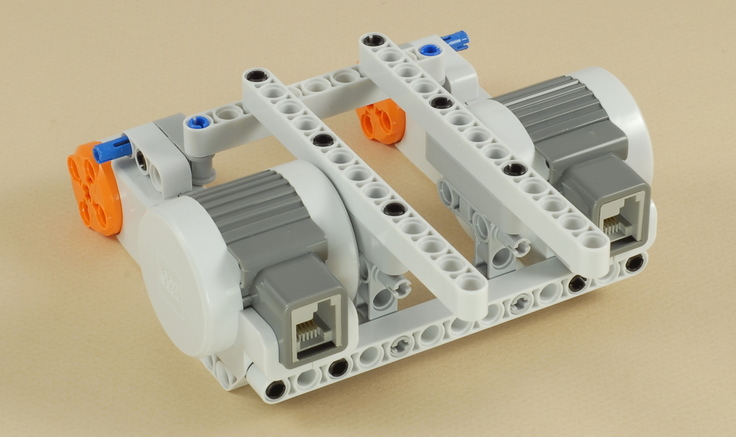
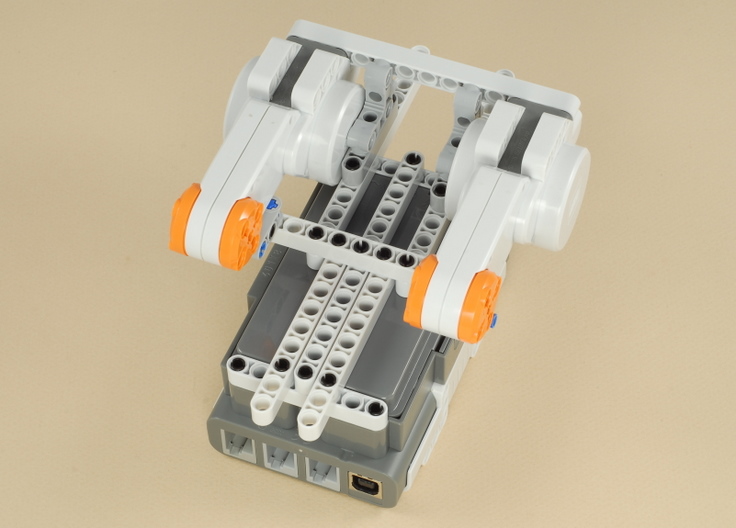
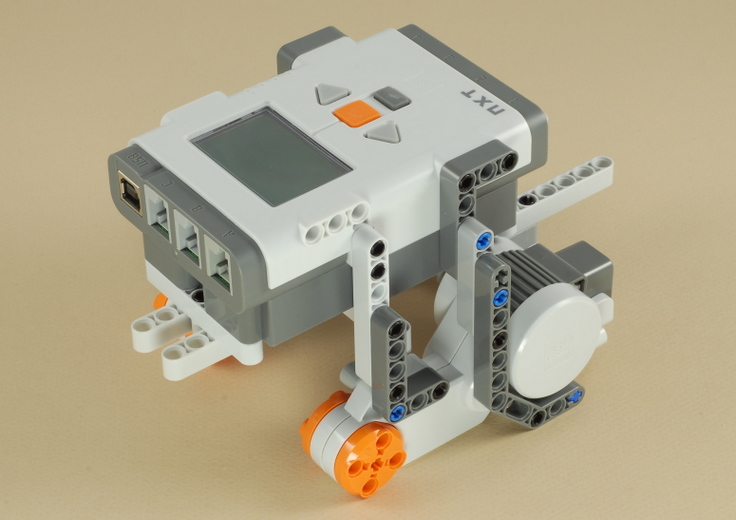
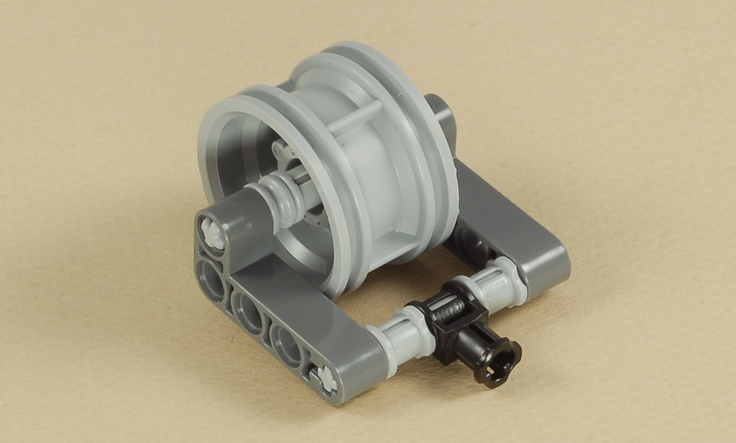
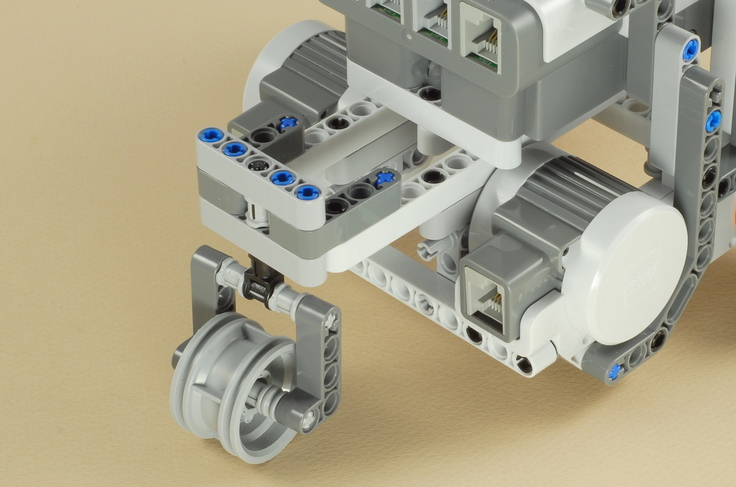
Этот робот использует два сервопривода и поворотное колесо.
Такая конструкция позволяет роботу легко перемещаться по любой поверхности пола: и по ковру и по твёрдому покрытию.
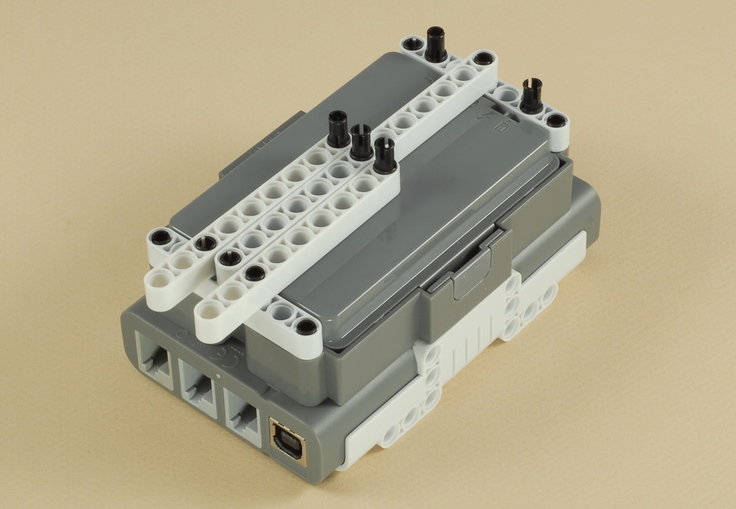
Этот вариант может питаться как от специализированной литевой аккумуляторной батареи NXT, так и от
стандартных батареек AA.
Трёхколёсный бот может быть использован как простой автомобиль, умеющий поворачивать или в
качестве базовой модели для других проектов. Так как робот может повернуть в любую сторону,
то он также поможет нам понять, как программируется блок перемещения.
В конце статьи имеются две простые базовые программы, которые демонстрируют различные виды поворотов с помощью кнопок блока.
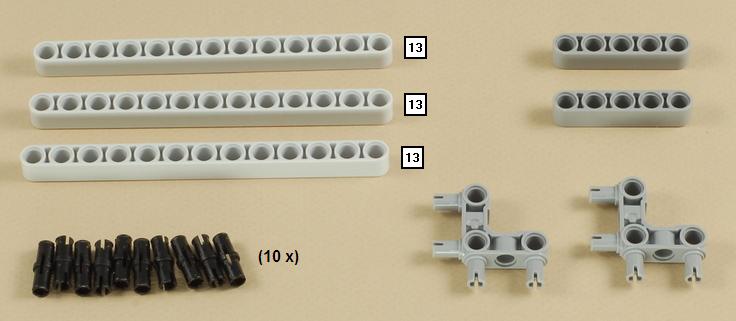
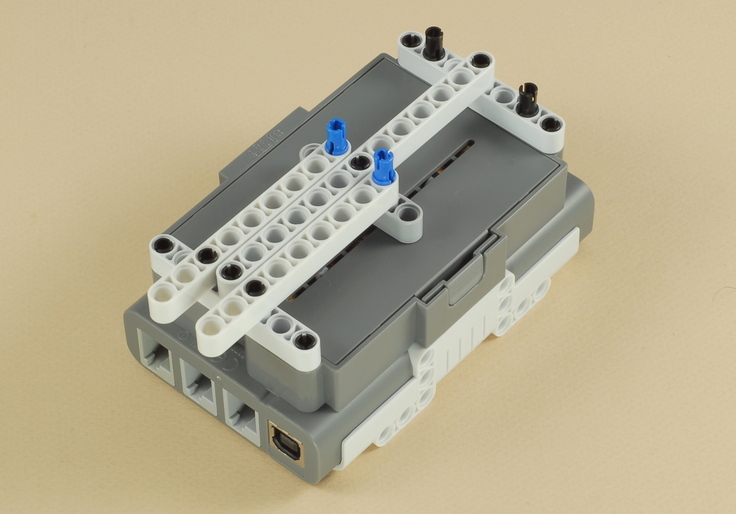
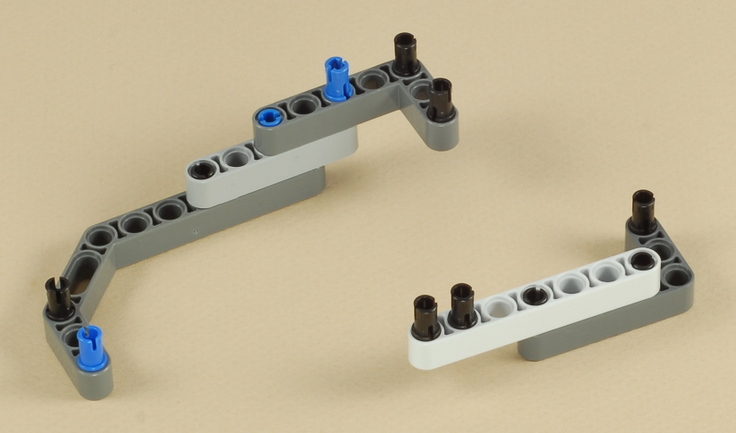
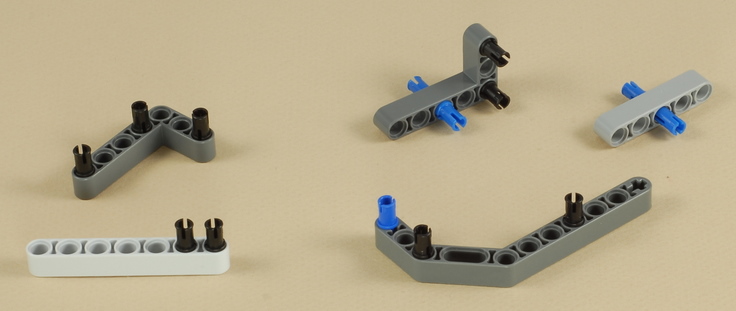
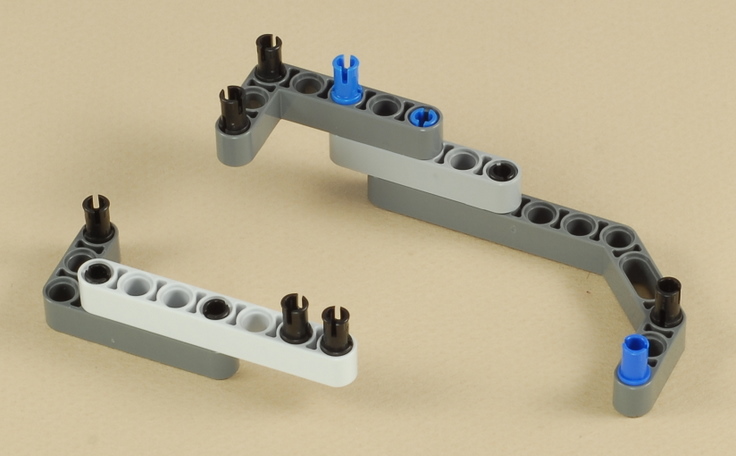
Пошаговая инструкция
1


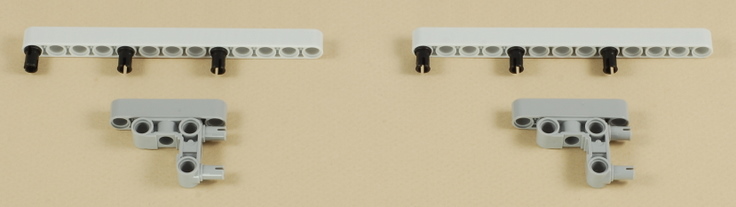
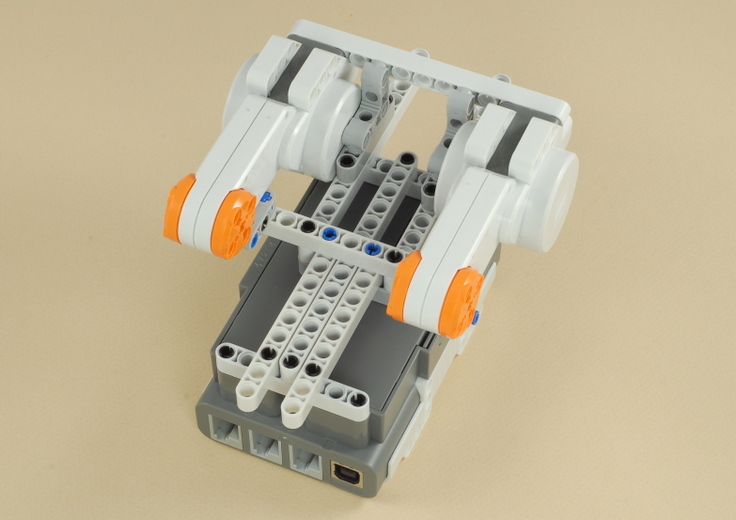
2
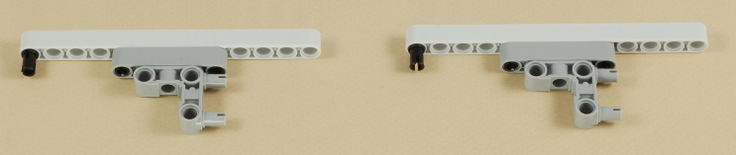
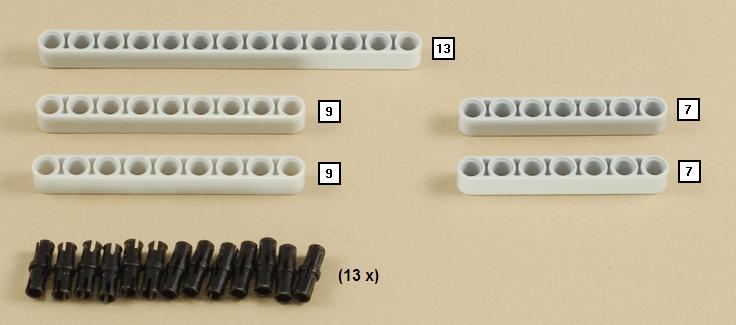
3
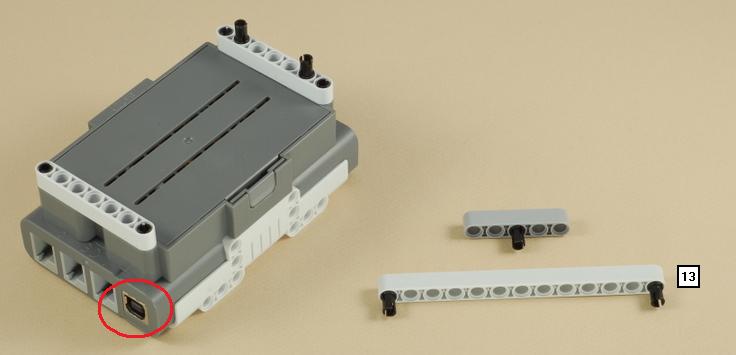
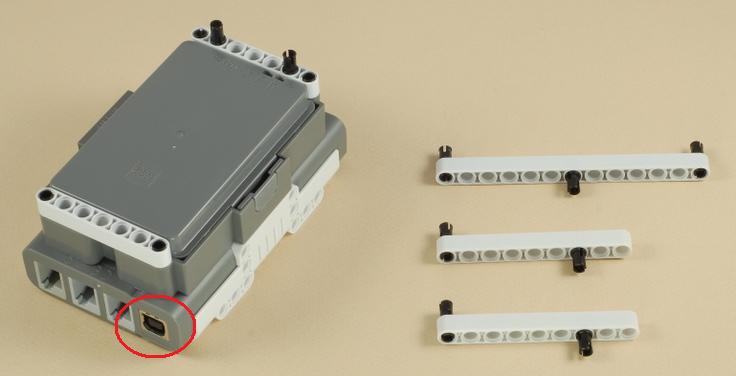
Важное замечание:Следуйте на шаг 3-АА при использовании батареи типа АА, или шаг 3-Li при использовании литиевой NXT аккумуляторной батареи.
3-AA
(ТОЛЬКО при использовании батарей типа AA)

Переходите к пункту 4
3-Li
(ТОЛЬКО при использовании литиевого аккумулаторного блока)
4

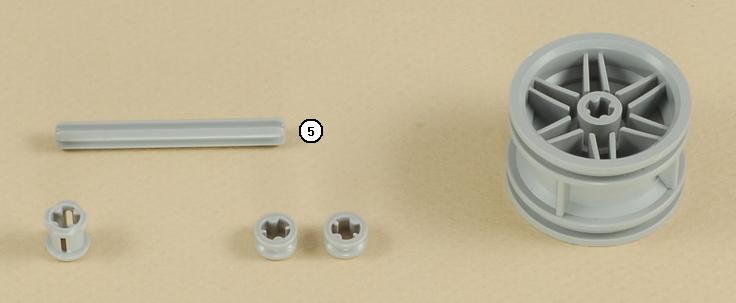
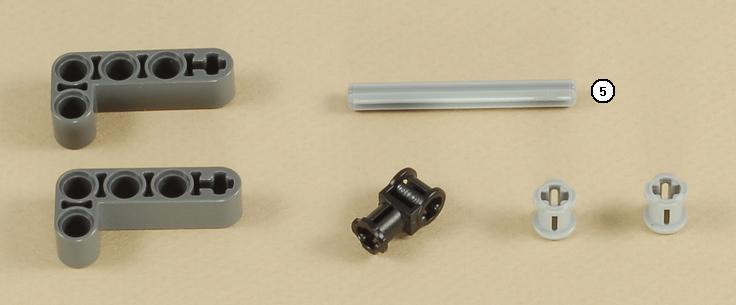
5
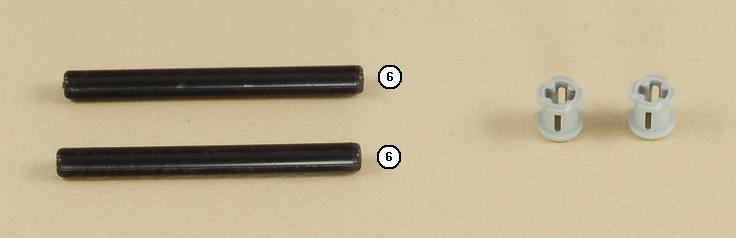
6
7

8
9

10
11

|
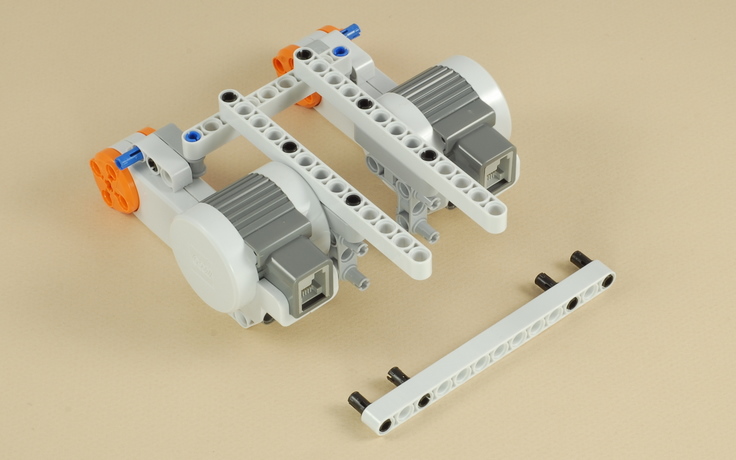
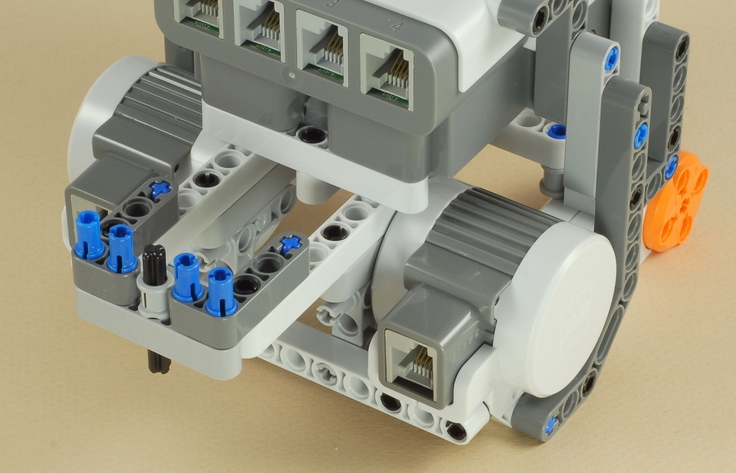
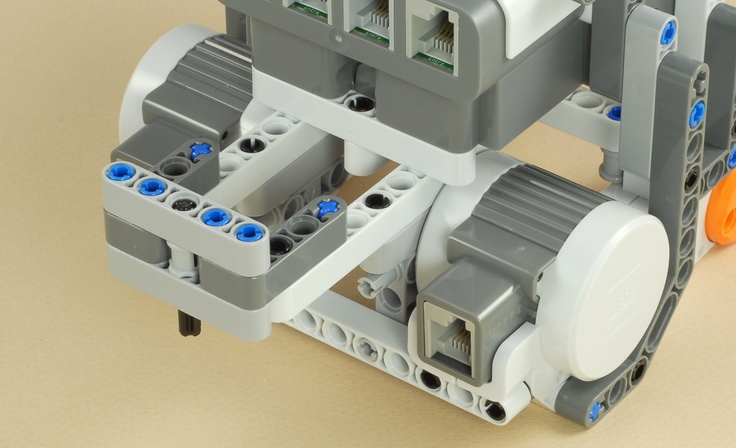
Используйте два провода средней длины для подключения двух серводвигателей к портам B и C контроллера NXT.
Важно: левый провод пропускайте по левой стороне, а правый провод по
правый (не пересекайте провода). |
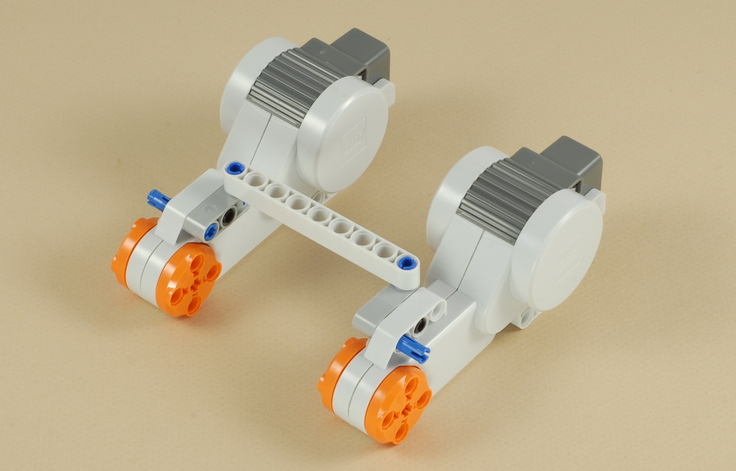
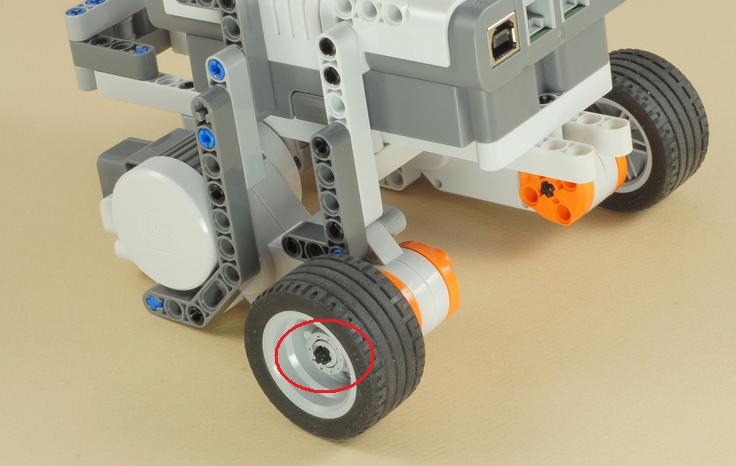
Совет по строительству: Балансируйте вес!
При создании трёхколёсного робота, важно учитывать весовой баланс робота.
Если Вы хотите хорошую поворачиваемость, то большая часть веса робота по-возможности должна
быть над ведущими колесами. Не часть веса должна оставаться и на третьем колесе
чтобы робот не опрокидывался.
Если больший вес у третьего колеса, робот может опрокинуться или ведущие колеса могут начать проскальзывать.
Однако, если слишком большой вес попадает на ведущие колеса,
то при движении назад робот может неожиданное... опрокинуться назад!
Мы провели эксперименты с разной развесовкой колёс. Выяснили, что общий вес робота 624 грамма,
466 грамм из которых приходится на ведущие колеса. То есть до 75% (466/624) веса должны приходится на ведущие колеса.
 |
 |
| Общий вес Трёхколёсного бота 624 грамма |
466 грамма (75%) приходится на ведущие колёса |
Программирование 3-х колёсного бота
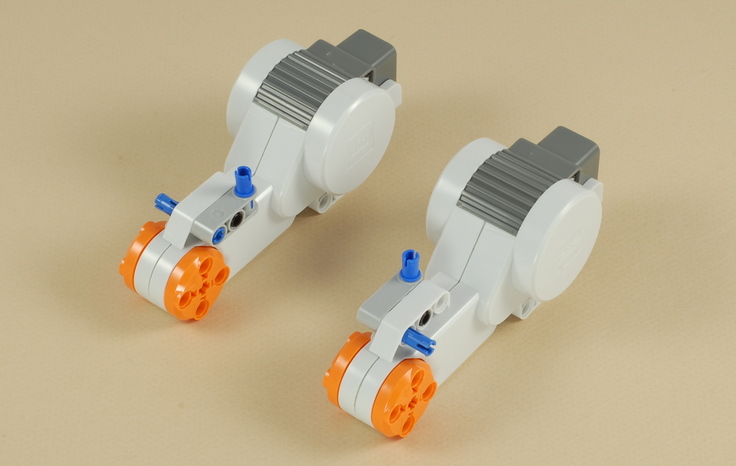
Наш трёхколёсный бот является одним из основных роботов с прочной конструкцией на двух сервоприводах.
Собирается он относительно легко. Вы можете использовать его в качестве
отправной точки для собственных проектов, и программировать его как хотите. Для
начала, вот несколько программ, которые демонстрируют перемещения (в том числе движения вперёд, назад и различные виды поворотов).
Простая программа движения робота с помощью блока "Движение" показывает три вида перемещений:
Поворот двумя двигателями, где колеса поворачиваются в противоположные стороны, чтобы робот быстро повернул направо.
поворот одного колеса, где робот поворачивается путем движения одного колеса
и остановкой других. Этот вид поворота занимает больше места, чем предыдущий вариант, но
получается, но, как правило, более точно.
Кривой поворот, где робот делает постепенный поворот путем перемещения одного колеса быстрее, чем другого.
Программа спирального поворота
демонстрирует использование особого метода управления.
|
Задачи для обучения
Попробуйте писать собственные программы, чтобы Трёхколёсный бот двигался и поворачивал.
Можете ли вы написать такую программу Трёхколёсному боту, чтобы он следовать по заранее
определенному пути прямо и повернул на заданное количество градусов там, где нужно?
Перекиньте соединительные кабели двигателей местами, поуправляйте роботом.
Попробуйте добавить некоторые элементы роботу! Например, вы можете сделать бульдозер-толкач и он будет толкать объекты по земле? Можете? Сделайте!
Попробуйте добавить несколько датчиков к нашему боту. Например, можно добавить датчик касания, чтобы робота останавливался, когда кнопка нажата.
Для любителей математических головоломок вот такая задача:
если вы попытаетесь написать программы спиральных поворотов,
а также экспериментировать с Руководящим ползунок в панели конфигурации блока Перемещения , то вы обнаружите, что
он имеет 11 различных значений, рассчитанных для руководящего параметра в спиральных программы (0, 10, 20,...,100).
Руководящий слайдер производит "нелинейный" эффект поворотов, который способствует более постепенному повороту.
Короче, надо разобраться что это за руководящий ползунок и с чем его едят ;-)
|
Источник: NXTprograms.com
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте