Россыпь робототехнических существ
24.08.2015, 19:26
Источник: 3dnews.ru
Одним из ключевых направлений в проектировании роботизированных механизмов является заимствование строения и модели поведения у представителей фауны — животных, рыб и насекомых. Достаточно вспомнить самого быстрого в мире робота Cheetah, перемещение которого напоминает бег гепарда, или принятых на вооружение американскими военными роботов-акул, паукообразного робота-гексапода, робота-кенгуру и многих других.

Робот-акула GhostSwimmer, разработанный для нужд армии США
Робот-водомерка
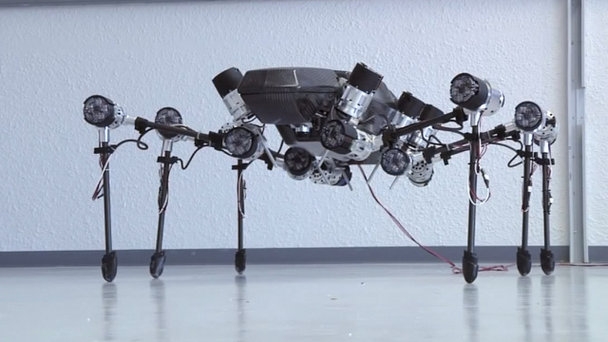
Ещё одно устройство, имеющее прообраз в живой природе, — это робот с шестью механическими конечностями по прозвищу Гектор. Отличительной особенностью разработки немецких инженеров из Университета Билефельда является то, что их детище способно преодолевать самые сложные препятствия благодаря уникальному алгоритму перемещения. Каждая из «лап» повторяет плавные движения, свойственные насекомым отряда привиденьевые — палочникам. Гектор не может похвастаться высокой скоростью передвижения, но разработчики изначально делали ставку именно на высокую проходимость модели.

Сверхлёгкий корпус Гектора изготовлен из углеволокна и оснащён набором датчиков, которые обеспечивают точность его движений. Модель, по утверждению авторов проекта, может стать удачной платформой для новых систем, основанных на сочетании робототехники и биологии. Так называемую «эластичность» движений Гектора можно сравнить с сокращением мышечной ткани живых организмов.
Однако здесь разработчики столкнулись с некоторыми трудностями: создать конструкцию с достаточной гибкостью искусственных «суставов» — задача трудная, но преодолимая. Другое дело — обеспечить правильную обработку считываемой датчиками информации и функционирование робота в полностью автономном режиме. Над последним как раз и ведётся активная работа, чтобы к 2017 году представить обновлённую версию.
Конечной целью проекта является адаптация шестиногого механизма к самостоятельному распознаванию преград в естественной среде, грамотному маневрированию и выбору наиболее оптимальной траектории движения.
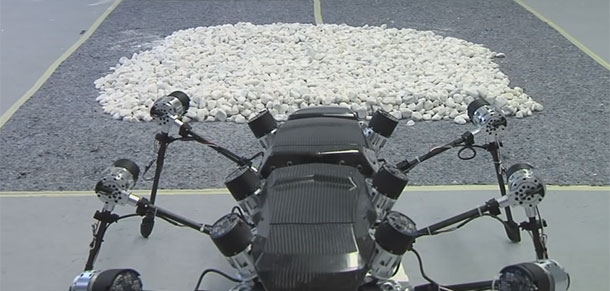
На данном этапе спроектированная конструкция — «тело» Гектора — насчитывает 18 приводов-суставов для различных типов поверхностей, а камеры и датчики ближнего действия отвечают за позиционирование тела при преодоления возникших на пути препятствий. Стоимость проекта, в рамках которого сотрудниками Билефельдского университета при поддержке учёных из Исследовательского центра изучения технологий когнитивного взаимодействия и был спроектирован Гектор, составила примерно €740 тыс.
|
Ключевые слова: Роботы подобные животным робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
