Учёные Карло Менон (Carlo Menon) из Команды передовых концепций европейского космического агентства (ESA Advanced Concepts Team) и Кристиан Лира (Cristian Lira) из технологического университета Каунаса (Kaunas University of Technology) создали миниатюрный манипулятор Smart Stick по "мотивам" устройства ноги паука и полагают, что он пригодится для будущих космических роботов.
Подобные паукам роботы (в том числе — для работы в космосе) давно не новость, только вот привод их ног отличается от оригинальной паучьей системы. Авторы же новой работы (она в журнале Bioinspiration and Biomimetics) полагают, что в некоторых случаях имеет смысл постараться скопировать паучьи ноги почти буквально.
В отличие от обычных животных, ноги пауков приводятся в действие не мышцами, а "гидравликой". Поворотом сочленений заведует жидкость (гемолимфа), заполняющая тело паука (и суставы), в которой паук может создавать то или иное давление.
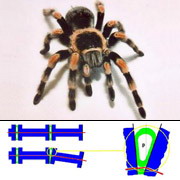
Менон и Лира разработали и построили миниатюрное сочленение, в котором поворот "конечностей" обеспечивают микроскопические камеры, разделяющие секции (смотрите рисунок в заголовке). Насос подаёт в камеры жидкость, а встроенные датчики давления обеспечивают для блока управления обратную связь.
В отличие от гидравлических поршней, здесь фактически нет трущихся поверхностей, конструкция (по идее) должна хорошо переносить жёсткие условия космоса — вакуум, перепады температур, радиацию.
Но главное — манипулятор и сустав получились не шире 1 миллиметра (почти как настоящие ноги паука) и при этом — довольно сильные. А превосходное соотношение между размером, весом и мощностью такой системы, полагают её создатели, должно очень пригодиться при построении миниатюрных роботов.
Один сустав Smart Stick обеспечивает угол поворота в 1,8 градуса, но ряд суставов, выстроенных последовательно, позволит манипулятору робота изгибаться в любую сторону и довольно сильно.
На схожем принципе должны работать и изделия, которые проектирует Лира в своём проекте "Ткань с варьируемой структурой" (Variable Structure Fabric — VSF). По его замыслу, миниатюрные гидроприводы, с сенсорами обратной связи и управляющей электроникой, подобные системе Smart Stick, можно встроить в одежду, сиденья автомобиля и интерьеры, чтобы способствовать снижению усталости человека, подолгу работающего, сидящего за рулём и так далее.
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте