 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
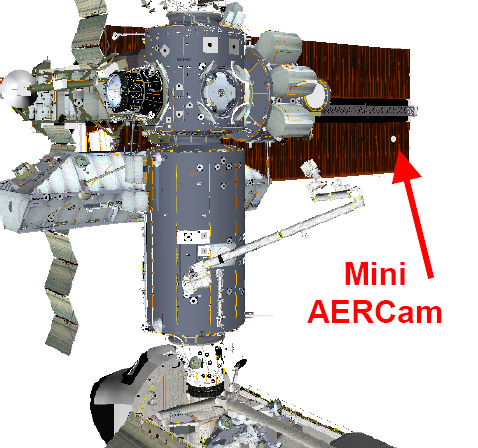
Мяч-надзиратель устроит челнокам проверку на орбите
Впрочем, главные отличия новой камеры от предшественницы – вовсе не в размерах. Роботизированная летающая камера поумнела. Mini AERCam будет иметь на борту космического челнока (а в перспективе – и на борту МКС) – внешнюю докинг-станцию (видимо, в грузовом отсеке), с которой будет состыковываться в автоматическом режиме. Через специальный разъём этот наноспутник будет пополнять свой запас электроэнергии и даже – топлива для ракетных двигателей (работающих на сжатом инертном газе – ксеноне). Там же он будет "отдыхать" в период, когда надобность во внешнем "глазе" отпадёт.
| ||
Основные элементы Mini AERCam. Стыковочный узел находится с противоположной стороны от двойной камеры (иллюстрация с сайта aercam.nasa.gov). |

Рабочий инструмент Mini AERCam – две цветные видеокамеры формата NTSC, смотрящие под углом 90 градусов друг к другу и камера высокого разрешения (1 мегапиксель), совмещённая с одной из первых двух камер.
Робот имеет 12 миниатюрных ракетных двигателей для перемещения вокруг космического корабля и ориентации.
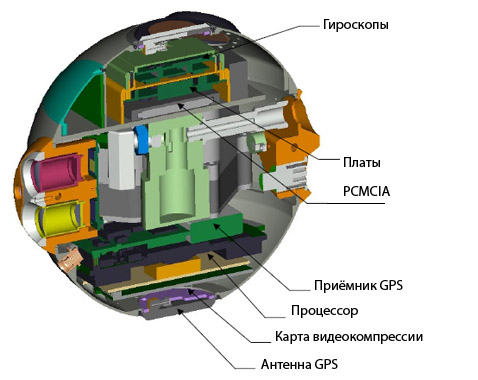
Электронная начинка робота-камеры. Слева и справа также можно увидеть сдвоенную камеру и стыковочный узел (иллюстрация с сайта aercam.nasa.gov).
Несколько десятков светодиодов обеспечивают подсветку снимаемых объектов.
Добавим, что такая съёмка может понадобиться не только для осмотра возможных повреждений конструкций, но и при проведении экспериментов в космосе, при манипуляциях с объектами космической "рукой" (её собственные камеры могут показать не всё) и в других похожих случаях.
|

Непростое действие. А ведь "мозг" робота-камеры не слишком впечатляет. Это процессор PowerPC 740 (266 мегагерц) и 64 мегабайта оперативной памяти, расположенные на уникальной материнской плате.
Кстати, усложнение "глаза" по сравнению с прежней версией – это важный шаг на пути к ещё более грандиозному проекту NASA – летающему прямо внутри космической станции роботу-помощнику астронавтов, также, заметим, выглядящему как небольшой мячик.
В первом полёте "возвращения" (STS-114) Mini AERCam ещё не будет применяться, но в дальнейших миссиях шаттлов – вполне вероятно.
