Домашний робот должен стоить 100000 рублей
14.02.2014, 13:13
Источник: habrahabr.ru
Почему я говорю так? Потому что я на пути создания такого робота. Потому что все роботы, которые есть сейчас это либо игрушки, либо научные разработки за стенами университетов, либо военные разработки, либо плоды стартапов. Либо пылесосы.
Есть несколько роботов, которые вполне могут претендовать на роль домашнего робота. Например, PR2 от Willow Garage. Вот он:
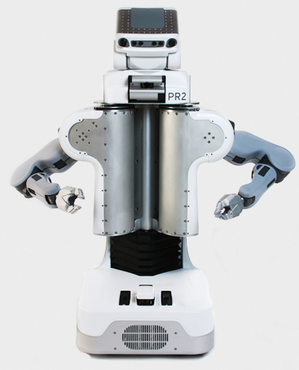
Знаете сколько он стоит? $400 000
И знаете, что он при этом умеет? Очень мало…
И это основная причина, которая до сих пор не позволяет каждому из нас иметь дома персонального робота, а ограничиваться только пылесосом… Точнее причины 2:
1. Купить робота дорого
2. Робот мало что умеет за такие деньги.
Получается замкнутый круг – для того, чтобы писать ПО для робота, нужно приобрести очень дорогое железо. А приобрести железо, которое ничего не умеет – дорого. Я разорву этот круг. Громкое заявление? Пожалуй.
Вот основные предпосылки, которые позволяют мне думать, что в ближайшие пару лет, любой желающий сможет cобрать сам или купить робота, который умеет делать что-то реально полезное, за $2999:
Появление Microsoft Kinect стоимостью $200 и SDK к нему (серьезно, без него я бы даже не начинал)
Появление большого количества наработок в области приложений для роботов, распознавания образов, навигации и т.п. Например, ROS, OpenCV и т.п.
Появление микроконтроллеров и датчиков к ним с низким порогом вхождения в разработку и программирование (ардуино)
Наличие большого количества стандартизированных элементов, таких как сервоприводы, мотор-редукторы, шаговые двигатели, видеокамеры, аккумуляторы и зарядные устройства к ним и т.п.
Все более широкое распространение 3D принтеров
Появление дешевых и довольно мощных ноутбуков в нише до $500
Замечательная open-source разработка inMoov, которая позволяет создать механическую руку почти во всем подобную человеческой (это вторая вещь без которой не стоило начинать) — видео ниже
Сервисы и API распознавания и синтезирования речи
Стоимость всего этого хозяйства вписывается в $3000!
И вот здесь я хочу сделать небольшую ремарку. Я готов создать открытую платформу робота за $2999. Но надо понимать, что все ПО для него написать я один не в силах. Цель проекта – дать возможность создания унифицированного дешевого открытого робота с тем, чтобы разрабатывать для него ПО всем желающим. А там хоть продавать его, хоть раздавать даром.
Основные принципы, положенные в основу создания платформы робота:
Все части робота унифицированы и дешевы. Они массово и тиражно выпускаются и продаются в магазинах.
Все пластиковые детали можно напечатать на 3D принтере, что не исключает их производства другими методами. Я готов наладить их промышленное производство при условии достаточного количества предзаказов или при получении начальных инвестиций.
Сборка робота и загрузка ПО не должны быть сложнее сборки любого икеевского шкафа
Робот имеет размеры, сравнимые с размером человека и руки подобные человеческим
На базовом уровне надо соблюсти законы робототехники и попытаться защититься от злонамеренного программирования роботов (все же масса + руки могут быть серьезным оружием или орудием)
Управление роботом осуществляется при помощи голоса, равно как и обратная связь. Помимо этого, робот может отображать информацию на дисплее ноутбука.
Программирование робота = управлению роботом. Т.е. программирование осуществляется при помощи отдачи голосовых команд. Каждая команда на низком уровне реализуется в виде программного кода.
Также обучение робота может производиться при помощи «перчаток» — надев такие перчатки, человек может выполнять движения, которые будут преобразованы в программу робота. Перчатки, правда, придется покупать отдельно – порядка $500 за пару. (Да, они гораздо дешевле предлагаемых решений и снимают информацию со всей руки начиная с плеча + пальцы)
Тем не менее, я прекрасно понимаю некоторую сомнительность приобретения такого железа. Все же деньги большие – 3-4 зарплаты для большинства соотечественников. Поэтому первое, что я предлагаю сделать – ферму роботов.
Ферма это помещение – одно или несколько, в котором находятся несколько роботов. Кроме этого, в помещении могут находиться и типичные предметы – столы, стулья, посуда и т.п. В идеале должно быть создано некоторое типичное окружение «как в квартире». К роботу можно будет подключиться через интернет и залить в него программу. После чего выполнить ее. Обратная связь будет обеспечиваться видео трансляцией с борта робота и с веб-камеры. Также с роботом можно будет общаться голосом, например, по скайпу.
Создание фермы позволит тысячам разработчиков создавать и отлаживать в реальных условиях ПО для робота. Мне бы хотелось, чтобы оно было открытым. Тогда любой желающий может собрать своего робота и залить на него это ПО. А тогда уже можно будет говорить и о мелкосерийном производстве. Тогда уже можно будет делать и App Store для роботов…
Вообще говоря, достаточно много полезного функционала можно написать имея только Kinect, подключенный к компьютеру.
Из чего же состоит робот:
Microsoft Kinect
Ноутбук
Шасси с 2 ведущими колесами и одним поворотным. 2 мотор-редуктора для колес
Корпус из пластика, который предусматривает установку специализированных расширений в отдельные отсеки
Аккумулятор + зарядное устройство
2 руки InMoov (пластик, провода, сервоприводы, ардуино)
«Нервная система» на базе ардуино, Motor shield и набора датчиков
Тем не менее, почему же я обращаюсь к вам и прошу помощи? Что у меня уже есть? Рассказываю и показываю:
Создан прототип робота без рук. Нервная система позволяет ему не натыкаться на препятствия и ориентироваться в пространстве. Программная начинка еще только разрабатывается, и в этом я надеюсь на вашу помощь. Сейчас в разработке «узнавание» лиц, распознавание жестов, голосовое управление.
Достигнута договоренность о производстве плат ардуино.
Достигнута договоренность о производстве пластиковых деталей для изготовления рук робота. Сейчас, при единичных тиражах, изготовление пластика для одной руки будет стоить порядка 50 000 руб. Для удешевления производства нужно наращивать массовость.
Вот такой рендер будущего робота (да, он немного отличается от прототипа на видео):

|
Ключевые слова: ардуино домашний робот роботов робот умеет создания видео роботов производство пластик распознавания мотор Роботы на платформе Ардуино робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте