16.08.2011, 17:05
plasticpals.com
Гепард – весьма популярное животное в мире современной роботехники. У Массачусетского технологического института есть свой проект Cheetah (именно так переводится название самого быстрого хищника на планете на английский), равно как у Boston Dynamics, сотрудничающей с DARPA. Пополнение в рядах «роботов-гепардов» также зреет в недрах Лаборатории роботехники и нейронных систем Университета Аризоны.
Руководителями проекта «Cheetah по-аризонски» являются Тони Льюис и Мэтт Бантинг. Последний в свое время отличился шестиногим роботом, вызвавшим повышенный интерес Intel. Команда представила Cheetah Robot еще на майской ICRA 2011, а сейчас стали известны интересные подробности о том, как устроены задние конечности «гепарда».
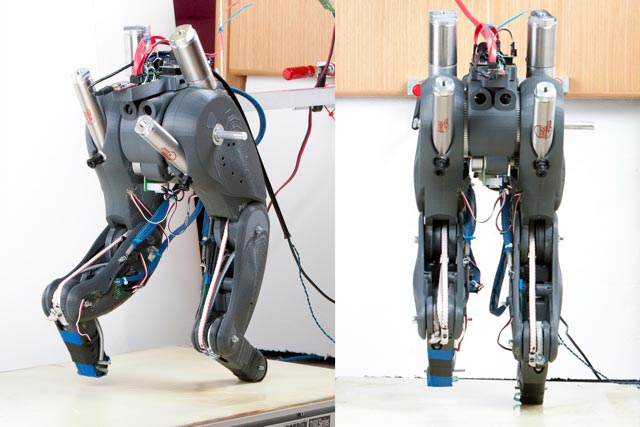
Главная особенность задних «лап» машины заключается в применении гибридного привода, в котором электрические моторы (модель RX-64) используются для точного позиционирования конечностей, а за всплески энергии отвечает пневматическая система. Пластиковая оболочка «лап» спроектирована в Solidworks и отпечатана на 3D-принтере аризонской лаборатории. Заканчиваются конечности «культями», которых, как продемонстрировал еще BigDog, вполне достаточно для сохранения уверенного контакта с землей.

На фотографиях конечностей заметно, что у бедренных сочленений есть только одна степень свободы. Это означает, что аризонский Cheetah не сможет выбрасывать задние «лапы» вперед так же, как настоящий гепард (на фото ниже). Вспоминая BigDog, можно также заметить огромную важность продольных движений конечностей для сохранения баланса, которые Cheetah в текущем состоянии конструкции не сможет совершать.
Впрочем, у роботехников Университета Аризоны наверняка есть свое оригинальное видение решения проблемы, так что будем с интересом ждать появления новых подробностей и видеороликов, демонстрирующих работу конечностей Cheetah.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
