07.03.2016, 17:58
Источник: 3dnews.ru автор: admin
Шведский автопроизводитель Volvo раньше времени начал тестовые испытания роботизированных мусоросборников, а также рассказал подробности о принципе их работы.
Новый проект Volvo, впервые анонсированный в июне 2015 года, называется Robot-based Autonomous Refuse handling (ROAR). Он предполагает разработку самоходных роботов, которые обнаруживают мусорные контейнеры на заданной территории, перемещают их до мусоровоза, опустошают и возвращают обратно.
Volvo детально рассказала о том, как работает ROAR. Мусоровоз останавливается неподалёку от мусорных контейнеров, водитель нажимает на специальную кнопку, и в воздух взлетает беспилотник, находящийся на крыше грузовика. Дрон сканирует местность на наличие мусорных баков и отправляет координаты их местоположения роботу на колёсах.
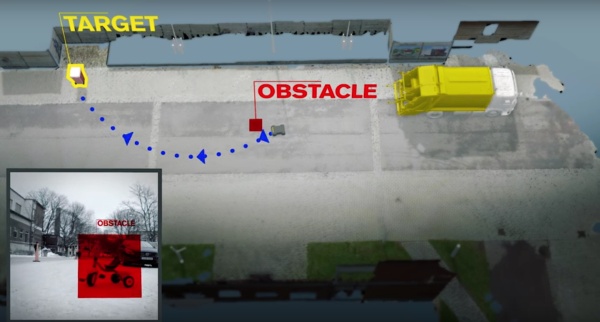
Тот съезжает с мусоровоза и, используя загруженную в память карту местности и информацию с беспилотника, собирает по очереди все баки, обнаруженные в округе. Благодаря GPS-приёмнику, модулю инерционных измерений (Inertial Measurement Unit) и лазерным датчикам LiDAR робот ориентируется в пространстве и объезжает препятствия.
Этот беспилотный мусоросборник самостоятельно забирает мусорный контейнер, отвозит его к грузовику, высыпает мусор и возвращает бак на исходную позицию. На задней части мусоровоза находится камера, которая следит за ситуацией около мусороприёмника. Если электроника обнаружила рядом с ним в опасной близости посторонний объект (например, человека), робот прекращает работу до устранения препятствия.
Водитель мусоровоза или его помощник могут из кабины контролировать местоположение робота и вручную останавливать его в случае необходимости.
Volvo и её партнёрам потребовалось всего четыре месяца на разработку рабочего прототипа робота-мусоросборника. Изначально планировалось начать тестирование ROAR в июне 2016 года.
«Мы предсказываем будущее, в котором будет больше автоматизации, — говорит руководитель проекта по разработке роботов Volvo Пер-Ледж Гётвалл (Per-Lage Götvall). — Этот проект призван стимулировать наше воображение с целью испытания новых концептов, способных создавать транспортные решения будущего».
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
