Подробная инструкция по сборке робота средней сложности. У этого робота уже есть одн датчик цвета, и уже можно писать средние по сложности программы для управления двумя серводвигателями на основании данных, полученных от датчика.
Версия лего миндсормс nxt 2.0 (версия 8647)
Сложность строительства ,
программирования:
Миссия этого робота состоит в исследовании всего вокруг.
Неважно где он находится: в Вашей комнате, дома, или где то на улице.
Робот «видит» стены и другие препятствия, старается не соприкосать с ними.
Подъезжая близко к препятствию робот поворачивает голову сначала налево, потом направо.
Определяет, в каком направлении лучше всего ехать, поворачивается и едет.
В случае, если он всё-таки случайно столкнётся с чем-то пердним бампером, то
датчик нажатия сработает и робот остановится, подумает в какую сторону повернуть. И лишь потом поедет в верном направлении.
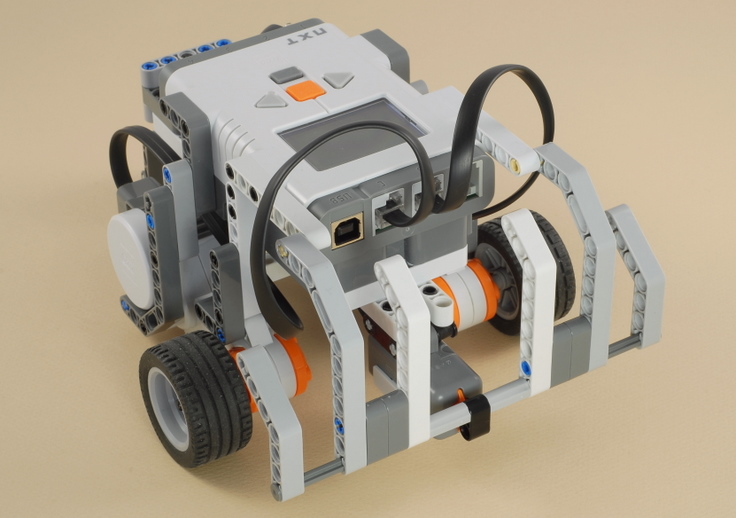
Первоначально соберите "Бот-внедорожник". Чтобы перейти к инструкции сборки этого робота нажмите на картинку ниже.
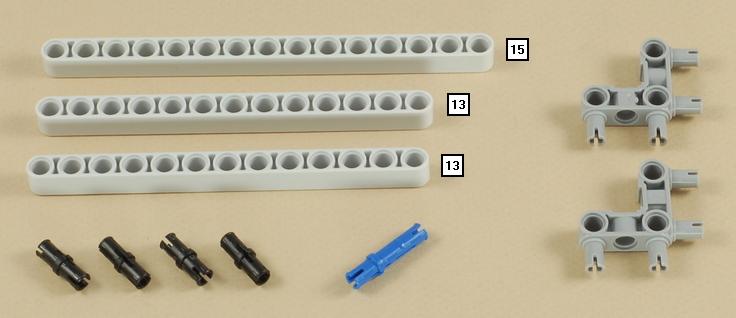
15
16
17
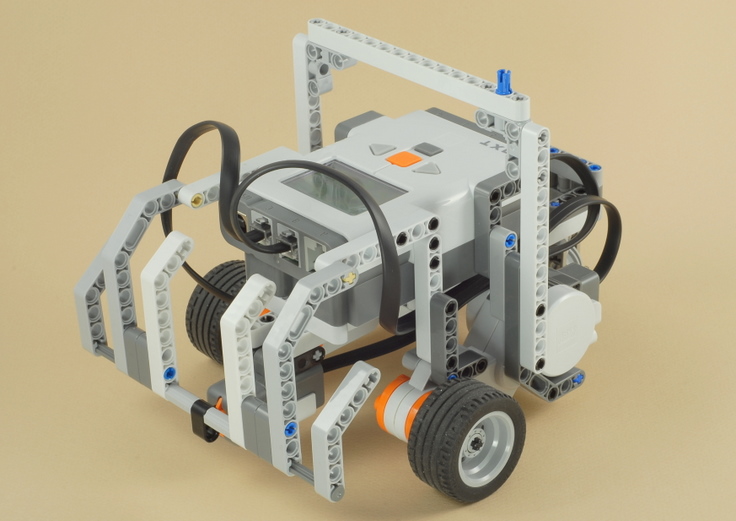
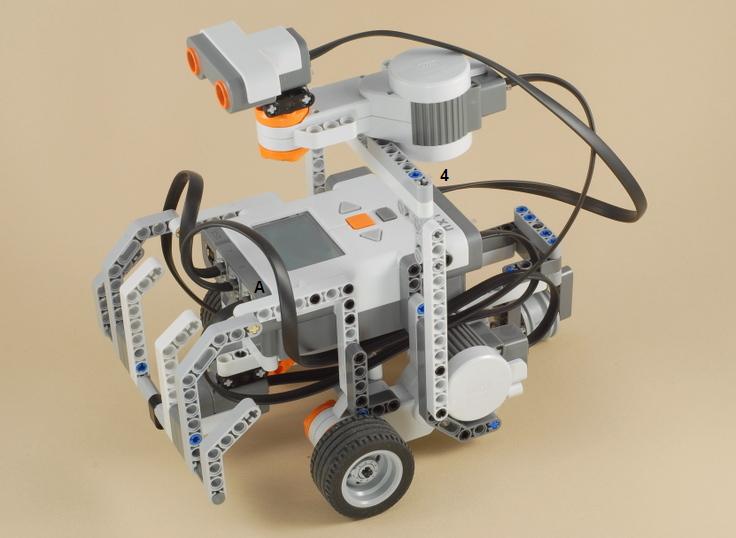
Подключите кабель двигателя в порт А на NXT, и провод ультразвукового датчика к порту № 4 на NXT.
Важно: Убедитесь, что провода не задевают бампер и что
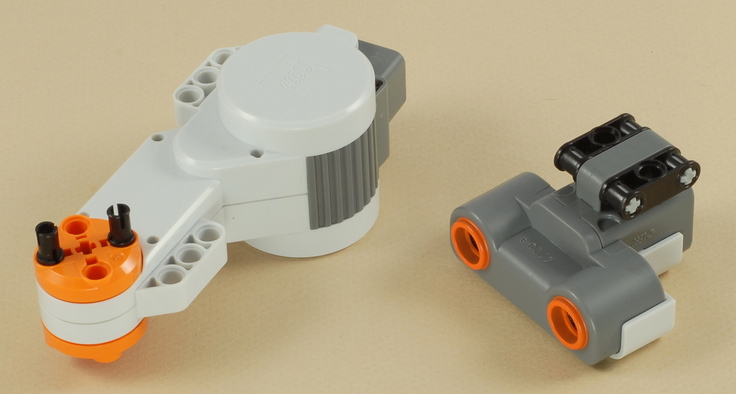
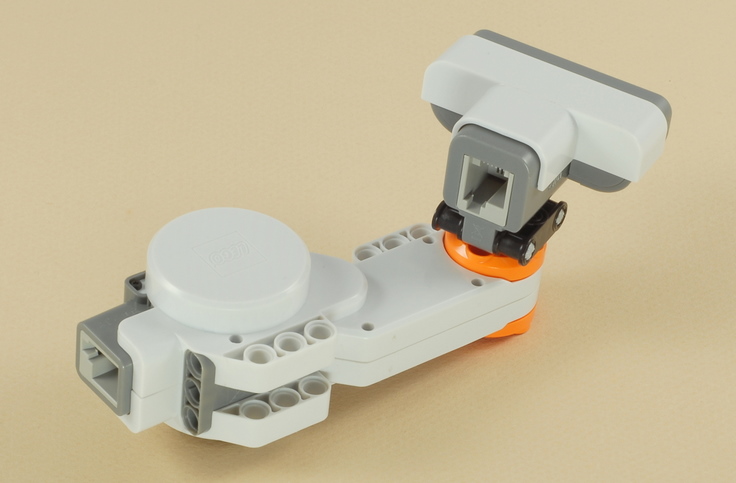
существует достаточный запас движения головы. Голова (ультразвуковой датчик)
должен поворачиваться до упора влево и вправо!
Программирование "Исследователя"
Используйте для работы "Исследователя". Программа заставляет робота повторять следующее:
1. Двигайся прямо, пока ультразвуковой датчик не увидит близко что-то или робот не упрётся бампер во что-нибудь;
2. Если робот задел что-нибудь бампером, издать звук и отъедь назад немного;
3. Поверни голову, посмотри направо, а затем налево, считай расстояние через ультразвуковой датчик, чтобы определить, в каком направлении больше пространства, то поворот в этом направлении.
Тестирование и подготовка к запуску "Исследователя"
Перед запуском программы убедитесь, что "глаза" ультразвуковых датчиков указывают прямо перед собой.
Это следует сделать для того, чтобы робот не путал где прямо, где лево, а где прямо!
Возможные эксперименты
Следите за своим роботом и предсказывайте вслух по какому пути
поедет Ваш робот при приближении к препятствию. Подумайте и проверьте может ли он застрять где-нибудь?
Попробуйте изменить программу в том месте, где запрограммирован блок зрения, то есть там, где робот
"видит" препятствия или натыкается на что-то. Можете ли вы придумать более эффективную стратегию, которая является более интересной или вероятность застревания робота в неё будет ещё меньше?
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте Миссия этого робота состоит в исследовании всего вокруг.
Неважно где он находится: в Вашей комнате, дома, или где то на улице.
Робот «видит» стены и другие препятствия, старается не соприкосать с ними.
Подъезжая близко к препятствию робот поворачивает голову сначала налево, потом направо.
Определяет, в каком направлении лучше всего ехать, поворачивается и едет.
В случае, если он всё-таки случайно столкнётся с чем-то пердним бампером, то
датчик нажатия сработает и робот остановится, подумает в какую сторону повернуть. И лишь потом поедет в верном направлении.
Миссия этого робота состоит в исследовании всего вокруг.
Неважно где он находится: в Вашей комнате, дома, или где то на улице.
Робот «видит» стены и другие препятствия, старается не соприкосать с ними.
Подъезжая близко к препятствию робот поворачивает голову сначала налево, потом направо.
Определяет, в каком направлении лучше всего ехать, поворачивается и едет.
В случае, если он всё-таки случайно столкнётся с чем-то пердним бампером, то
датчик нажатия сработает и робот остановится, подумает в какую сторону повернуть. И лишь потом поедет в верном направлении.