Двухколесный балансирующий робот Ardu
14.02.2014, 12:25
Источник: www.pobot.ru
Купить гидронасос нш 10 в Москве https://www.gidro.ru/catalog/nasosy_shesteryennye/_10/.
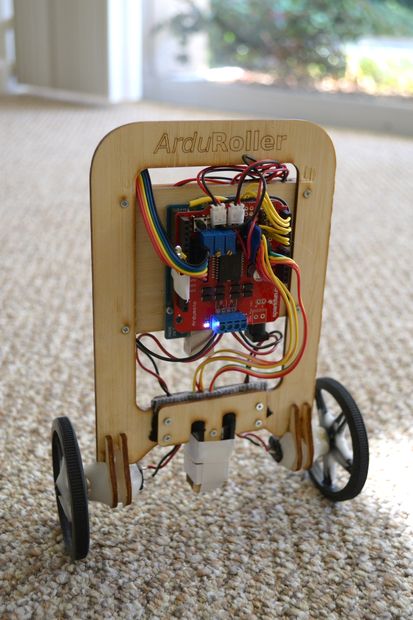
В данной инструкции будет показано, как собрать балансирующего робота ArduRoller. Он достаточно хорошо балансирует и очень быстро реагирует на большую часть толчков. Но иногда, чем слабее будет ваш толчок, тем лучше, плавнее он будет двигаться по комнате – при этом, его скорость будет постоянной. Автор Шон Крэмтон (Shaun Crampton) все еще работает над этим.
Так выглядит робот в действии: www.flickr.com/photos/fasaxc/5944650602/
Вот список использованных частей, деталей и материалов:
Arduino Uno
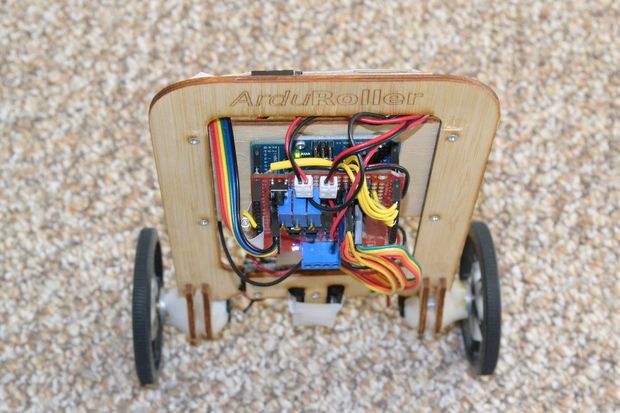
Драйвер мотора Sparkfun Ardumoto
Bluetooth-модем Sparkfun BlueSmirf
Два моторчика с редуктором 24:1
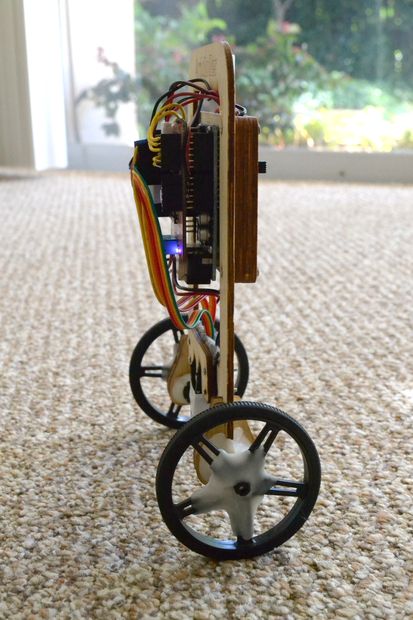
Два колеса (по 70 мм)
Две батареи 3.7V Li-poly 850MAh
Модуль гироскопа ADXRS613 Sparkfun, закрепленный на оси вращения колес
Акселерометр ADXL203CE – также закреплен на оси вращения колес
Светодиод
Шасси – 2.7мм бамбуковая фанера
Пластик InstaMorph
Примечания:
Акселерометр: Я первоначально попытался собрать робота только с акселерометром для сенсора наклона, без гироскопа. Такой подход оказался обреченным на провал: акселерометр был разбит ускорением двигателей – таким образом, он не может использоваться для определения наклона во время ускорения робота. С другой стороны, использование только гироскопа сделало бы робота способным дрейфовать в течение долгого времени – следовательно, вам необходимы оба прибора.
Гироскоп: Я использовал гироскоп с показателем 150 градусов в секунду. Из наблюдений за телеметрией моего робота я заметил, что иногда происходит клиппирование, когда вы производите толчок робота. Так что, если бы я начинал все сначала, то я, вероятно, искал бы модель с 300 градусами в секунду.
Колеса: Колеса немного хрупки, после нескольких ударов я заметил трещины вокруг оси. Таким образом, я усиливал их пластиком InstaMorph.
Моторчики: Я также попробовал моторчики с редуктором sparkfun 100:1, но они не были достаточно быстры. У варианта 24:1 хороший вращающий момент и скорость.
Bluetooth: Сейчас я использую bluetooth-модем для телеметрии, но я также планирую использовать его для дистанционного управления от моего Андроида. Если Вы опустите это, то робот будет все еще работать, но его настройка будет более сложной.

|
Ключевые слова: робота робот Sparkfun гироскоп работает вращения Crampton модем датчик наклона редуктор Крэмтон балансирует Роботы на платформе Ардуино робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
