20.07.2007, 13:33
Сходу трудно догадаться, что перед нами. Это нога робота, способного бегать по воде. Запаса плавучести у машинки нет никакого, зато она может с силой отталкиваться от поверхности (кадр NanoRobotics Laboratory).
|
Говорят, что секрет хождения по воде прост. Надо толкаться быстро-быстро,
чтобы не успеть проваливаться. В природе этому фокусу научилась небольшая
ящерица, а в технике – небольшой робот, который внешне на ящерицу совсем не
похож. Правда, пока робот делает лишь первые шаги под присмотром
"родителей".
О том, как заставить машину бегать по поверхности воды, не полагаясь на
силу Архимеда, давно думают Метин Ситти, глава лаборатории нанороботов
университета Карнеги-Меллона и его коллеги Стивен Флойд (Steven Floyd), Теренс
Киган (Terence Keegan) и Джон Палмизано (John Palmisano). Ситти, к слову,
постоянным читателям "Мембраны" знаком. Это он и его подчинённые построили
робота-геккона и микроробот-камеру. Заметим также, что, несмотря на название,
группу интересуют как нано-, так и микромеханизмы, а ещё роботы традиционных,
макроскопических размеров.
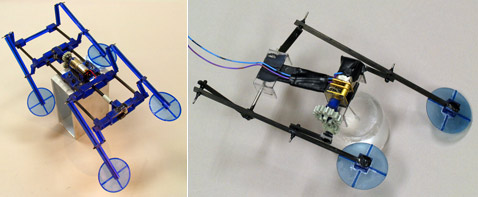
Авторы проекта построили два прототипа бегающих по воде машинок — с четырьмя и двумя ногами (фотографии NanoRobotics Laboratory).
|
Робот, который мог бы бегать одинаково хорошо и по суше, и по воде, смог бы найти массу применений: от радиоуправляемых игрушек до небольших автоматизированных исследователей, способных двигаться по любой поверхности. А далее, кто знает, вдруг такие машины удастся построить столь большими, что они смогут нести на себе человека? И пусть в природе так бегают лишь очень лёгкие ящерицы, ведь если машину удастся сделать достаточно мощной… Собственно,секрет хождения по воде ящерицы-василиски раскрыли учёным ещё в 2004-м, но группа Ситти решила провести свои изыскания. Она пишет, что впервые составила математическую модель взаимодействия ног ящериц-василисков с водой.
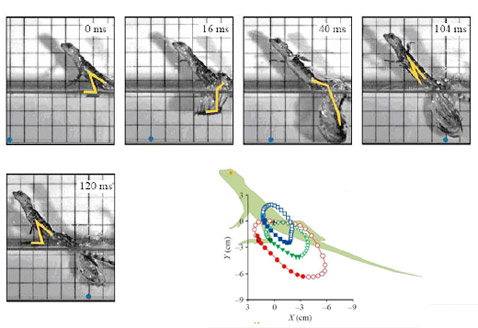
Прежде чем строить роботов, инженеры детально выяснили, как движутся лапки ящерицы, каждый её сустав (иллюстрации NanoRobotics Laboratory).
|
Постаравшись воспроизвести движения ящерицы в металле, исследователи построили роботов Water Runner. Авторы этих бегающих по воде машин считают, что такой способ передвижения экономичнее традиционного плавания, поскольку, мол, аппарат не сталкивается с сопротивлением, вызванным вязкостью воды.

Четырёхногий робот-ящерица в действии. Несмотря на то, что аппарат подвешен, он развивает заметную тягу. Это видно по отклонению нитей от вертикали. На левом кадре робот бежит влево, на правом — на зрителя (кадры NanoRobotics Laboratory).
|
Надо сказать, что тема хождения по воде занимает умы исследователей из NanoRobotics Laboratory очень плотно. Напомним, такой робот полагается, опять-таки, не на силу Архимеда, а на силы поверхностного натяжения. Его тонкие и длинные ножки-проводки, покрытые водоотталкивающим полимером, не проваливаются в воду, хотя вес робота может составлять несколько граммов.
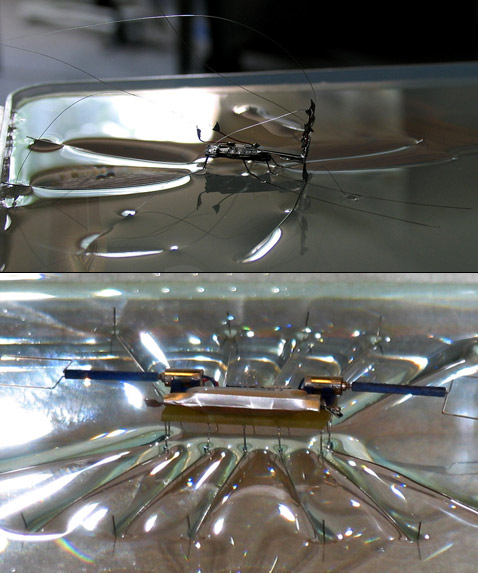
Две модели роботов-водомерок (вообще-то, их было построено значительно больше). Длина ног этих машинок составляет 5 сантиметров, толщина — доли миллиметра. "Гребные" ножки роботов (обычно это только пара ног из общего их числа в 6, 8 или 12, в зависимости от модели) совершают эллиптические движения (колеблются одновременно по горизонтали и вертикали) 40 раз в секунду, но не проникают в воду, а бегут по ней. Остальные ножки служат лишь для поддержания сантиметровых машинок на плаву, исключительно за счёт силы поверхностного натяжения (фотографии NanoRobotics Laboratory).
|
За прошедшее время этот проект получил развитие и, как сообщает PhysOrg.com, последние версии роботов-водомерок под названием STRIDE (Surface Tension Robotic Insect Dynamic Explorer) при собственном весе в 1 грамм могут нести вес до 9,3 грамма. Они могут бегать по слою воды толщиной всего 3 миллиметра. А самая мощная модификация такого робота, весом 6 граммов, развивает скорость в 8,7 сантиметра в секунду (первые роботы-водомерки показывали 3 сантиметра в секунду). Конечно, водомерка живая разгоняется куда сильнее – до 1,5 метров в секунду. Но зато роботы, как и насекомое, могут двигаться в разные стороны, поворачивать и вращаться на месте, даже пятиться назад. Сейчас Ситти со товарищи работают над уменьшением веса своих созданий (живая водомерка весит всего 0,01 грамма), причём в них желательно не только имплантировать пьезоэлектрические микромоторы (благодаря которым роботы и бегают), но и ухитриться поместить туда различные датчики. Ведь конечная цель проекта — создание микророботов, способных собирать различную информацию об окружающей среде, скажем, о загрязнении водоёмов.
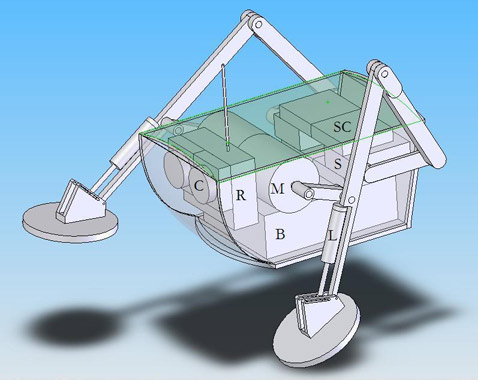
Так может выглядеть финальный вариант Water Runner. Буквами показаны электромотор, блок управления, батарея и набор сенсоров с радиопередатчиком в качестве полезной нагрузки (иллюстрация NanoRobotics Laboratory).
|
И Water Runner, и Water Strider доказали свою работоспособность на практике. На страничках этих проектов можно найти несколько роликов испытаний данных машин. Правда, пока роботы-ящерицы бегают по воде на привязи, компенсирующей их вес. К тому же энергия подаётся им извне, по проводам. И всё же лапки Water Runner молотят по воде с завидной силой и, едва ли не главное, скоростью. Можно предположить, что после оптимизации различных параметров, вроде траектории лап, подобные машинки вполне могут пробежаться по воде уже самостоятельно. Тут уместно вспомнить, что роботы-водомерки также начинали свой путь с "привязных" рейсов, но теперь разгуливают по воде автономно, не хуже своих природных прототипов.
Источник: Membrana
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте

