11.10.2006, 11:48
В этой небольшой статье конструктор-робототехник И Вей (I Wei) описывает, как он собрал робота, работающего на паровом двигателе.
Работа надо роботом началась, когда я купил вот этот паровой двигатель Cheddar Puffin на электронной ярмарке ebay (е бей ру. Это было нечто. Пришлось потратить кучу времени, чтобы вернуть его в рабочее состояние. Мне понадобилось заменить смотровое стекло, множество уплотнительных колец и починить сам двигатель. Цилиндры соскочили с держащих осей и пришлось разобрать весь двигатель на части. Наконец, все, что можно было починить, было починено, и двигатель заработал, даже с неплохой мощностью.
Колесная база робота сделана из двух шасси Tamiya TLT-1 без одной пары колес. Все колеса могут вращаться независимо друг от друга. Электромотор я ставить не стал, а взял пару шестерней, закрепил их на валу и удлинил шасси. На одном конце стоит звездочка, которая позже будет связана с паровым двигателем.
Паровой двигатель весит 5 фунтов (2,3 кг), причем это без воды, бака с топливом, компрессора и т.д. - Tamiya TLT столько не выдерживает. Их рессоры не рассчитаны на такой вес, и даже с более мощными пружинами робот начинал качаться на поворотах. В конце концов, я надел пластиковые трубки на рессоры, - и это вроде как решило проблему.
Во время проверочных испытаний мне пригодился лишний баллон для газа, а то бы пришлось заправлять робот после каждой попытки.
В первой модели робота поворот всех пар колес контролировался тремя независимыми каналами, еще один канал оставался для изменения скорости движения. Но так управлять роботом неудобно: начинаешь путаться в этих ручках, пытаясь одновременно повернуть все три. С такой сложной системой управления я долго биться не стал и, в конце концов, отключил среднюю пару колес и синхронизовал две остальных. Получилась двухканальная система, очень простая в управлении.
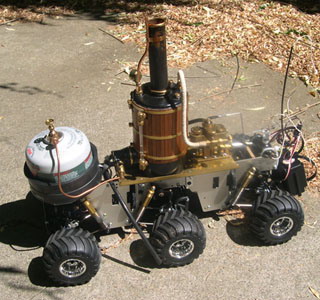
А вот несколько фотографий законченного робота.
Будем надеятся, что он скоро появится на площадке е бей ру. И мы сможем приобрести такого же робота домой!
Источник: Crabfu.com
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте